
阿里云开发者社区



大家在互动










综合
最新
有奖励
免费用
一文解读:阿里云AI基础设施的演进与挑战
对于如何更好地释放云上性能助力AIGC应用创新?“阿里云弹性计算为云上客户提供了ECS GPU DeepGPU增强工具包,帮助用户在云上高效地构建AI训练和AI推理基础设施,从而提高算力利用效率。”李
Apache RocketMQ ACL 2.0 全新升级
RocketMQ ACL 2.0 不管是在模型设计、可扩展性方面,还是安全性和性能方面都进行了全新的升级。旨在能够为用户提供精细化的访问控制,同时,简化权限的配置流程。欢迎大家尝试体验新版本,并应用在
案例分析|线程池相关故障梳理&总结
本文作者梳理和分享了线程池类的故障,分别从故障视角和技术视角两个角度来分析总结,故障视角可以看到现象和教训,而技术视角可以透过现象看到本质更进一步可以看看如何避免。

给技术新人的ODPS优化建议
数据开发基本都是从陌生到熟悉,但是写多了就会发现各种好用的工具/函数,也会发现各种坑,本文分享了作者从拿到数据到数据开发到数据监控的一些实操经验。
【一文看懂】Havenask单机模式创建
本次分享内容为Havenask单机模式,由下面3个部分组成(Hape工具介绍、创建单机版Havenask、Hape问题排查),希望可以帮助大家更好了解和使用Havenask。
飞天技术沙龙 | AI原生应用架构专场

阿里云云原生开源开发者沙龙北京站 PPT 合集


乘风问答官5月排位赛开启!
2024年5月起乘风问答官专属活动全新起航鼓励问答官们积极给予高质量的解答和参与讨论给社区带来更好的体验~2024年5月问答官专属每周积分活动、每月排位赛开启欢迎问答官们参与。 面对对象 所有乘风问
一文浅谈CodeReview中的一些思考
CodeReview在日常的开发过程中越来越被重视,它在提高代码质量同时促进团队成员之间的知识共享和技能提升方面发挥了诸多作用,本文将主要围绕CodeReview展开,简单聊聊在CodeReview过
让研发规范管得住 - 我们为什么在流水线之上又做了研发流程?
研发规范的目标,是为了解决或降低出现软件危机的风险。但传统流水线受限于工具的定位,无法解决研发规范的落地问题,需要在更高的层面来解决。阿里云云效团队经过内部启发后推出的新产品:云效应用交付平台 App
为什么要用 Tair 来服务低延时场景 - 从购物车升级说起
“购物车升级”是今年双十一期间提升用户体验的关键项目,展示了大淘宝技术团队致力于通过技术突破消费者和商家体验的天花板。低延迟是这些挑战中的核心,内存数据库Tair因其高吞吐、大连接数、热点请求处理、异
最佳实践|如何使用c++开发redis module
本文将试着总结Tair用c++开发redis module中遇到的一些问题并沉淀为最佳实践,希望对redis module的使用者和开发者带来一些帮助(部分最佳实践也适用于c和其他语言)。
10倍性能提升-SLS Prometheus 时序存储技术演进
本文将介绍近期SLS Prometheus存储引擎的技术更新,在兼容 PromQL 的基础上实现 10 倍以上的性能提升。同时技术升级带来的成本红利也将回馈给使用SLS 时序引擎的上万内外部客户。
1 名工程师轻松管理 20 个工作流,创业企业用 Serverless 让数据处理流程提效
为应对挑战,语势科技采用云工作流CloudFlow和函数计算FC,实现数据处理流程的高效管理与弹性伸缩,提升整体研发效能。
SLS 查询新范式:使用 SPL 对日志进行交互式探索
像 Unix 命令一样支持多级管道级联,像加工预览一样实时处理查询结果,更便捷的交互,更丰富的算子,更灵活的探索半结构化日志,快来试试使用 SPL 语言查询日志数据吧~
得物 ZooKeeper SLA 也可以 99.99%丨最佳实践
在本文中,作者探讨了ZooKeeper(ZK)的一个内存占用问题,特别是当有大量的Watcher和ZNode时,导致的内存消耗。
流水线运行出错排查难?AI 来帮你
目前云效流水线 Flow 内 Java 构建、Node.js 构建、Java 单元测试、Node.js 单元测试这 4 个步骤均接入了智能排查的能力。
数据管理的艺术:PolarDB开源版详评与实战部署策略(一)
PolarDB-X是阿里巴巴自研的高性能云原生分布式数据库,基于共享存储的Shared-nothing架构,支持MySQL生态,具备金融级高可用、分布式水平扩展、HTAP混合负载等能力。它通过CN(计
高峰无忧,探索PolarDB PG版Serverless的弹性魅力
在数字经济时代,数据库成为企业命脉,面对爆炸式增长的数据,企业面临管理挑战。云原生和Serverless技术革新数据库领域,PolarDB PG Serverless作为阿里云的云原生数据库解决方案,
【云效流水线 Flow 测评】驾驭云海:五大场景下的云效Flow实战部署评测
云效是一款企业级持续集成和持续交付工具,提供免费、高可用的服务,集成阿里云多种服务,支持蓝绿、分批、金丝雀等发布策略。其亮点包括快速定位问题、节省维护成本、丰富的企业级特性及与团队协作的契合。基础版和
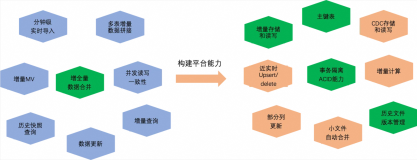
MaxCompute 近实时增全量处理一体化新架构和使用场景介绍
本文主要介绍基于 MaxCompute 的离线近实时一体化新架构如何来支持这些综合的业务场景,提供近实时增全量一体的数据存储和计算(Transaction Table2.0)解决方案。
保姆级python项目离线部署服务器教程只需这一篇就够了(建议收藏)
这篇文章提供了详尽的Python项目在离线Linux(CentOS)服务器上的部署教程。作者首先介绍了环境背景,强调了无网络环境和使用有网络的CentOS虚拟机准备安装包的重要性。教程分为两部分:外网

Llama 3开源!魔搭社区手把手带你推理,部署,微调和评估
Meta发布了 Meta Llama 3系列,是LLama系列开源大型语言模型的下一代。在接下来的几个月,Meta预计将推出新功能、更长的上下文窗口、额外的模型大小和增强的性能,并会分享 Llama

基于Ollama+AnythingLLM轻松打造本地大模型知识库
Ollama是开源工具,简化了在本地运行大型语言模型(ile优化模型运行,支持GPU使用和热加载。它轻量、易用,可在Mac和Linux上通过Docker快速部署。AnythingLLM是Mintple
Python小项目:利用tkinter开发测手速小游戏
这个小游戏使用Tkinter创建了一个简单的图形用户界面,用户点击“开始”按钮开始测试,然后点击“停止”按钮停止测试并显示反应时间。你可以根据需要进一步定制化游戏的界面和功能。
OpenKruise v1.6 版本解读:增强多域管理能力
OpenKruise 在 2024.3 发布了最新的 v1.6 版本(ChangeLog),本文对新版本的核心特性做整体介绍。
Python人工智能与机器学习
【4月更文挑战第11天】Python在AI和ML领域占主导地位,得益于其简洁语法、强大库支持和活跃社区。关键应用包括数据预处理(Pandas, NumPy)、模型训练(scikit-learn, Te
【专栏】Python在人工智能领域的应用现状、优势及未来趋势
【4月更文挑战第27天】本文探讨了Python在人工智能领域的应用现状、优势及未来趋势。Python作为数据科学、机器学习、深度学习和自然语言处理的首选语言,拥有丰富的库如NumPy、Pandas、T
应用研发平台EMAS中热修复有需要冷启动生效 有的不需要,如果需要冷启动就杀进程,有没有办法?
应用研发平台EMAS中热修复有需要冷启动生效 有的不需要如果需要冷启动就杀进程反之不杀有没有办法

应用研发平台EMAS中有遇到Flutter更新3.19版本以后,能审核通过的问题吗?
应用研发平台EMAS中有遇到Flutter更新3.19版本以后OPPO审核不通过华为、小米、VIVO都能审核通过的问题吗OPPO审核不通过的原因是违规获取个人信息。同样的代码不做任何修改Flutte
应用研发平台EMAS中sdk 安卓热更新能做到所有机器都更新到吗?
应用研发平台EMAS中sdk 安卓热更新能做到所有机器都更新到吗一般正常的手机 像小米华为oppo这些是只能用来修复线上bug 还是 做功能更新也能用啊
应用研发平台EMAS中流水线构建产物这个错误,应该怎么修改?
应用研发平台EMAS中流水线构建产物这个错误应该怎么修改是与缓存的 sdk 不兼容吗参考错误 /Users/agent/alibaba/workspace/Pods/FBRetainCycleDet
应用研发平台EMAS中流水线打 ios 的 debug 包,接收不到极光推送,这个问题怎么解决?
应用研发平台EMAS中有个问题咨询一下流水线打 ios 的 debug 包接收不到极光推送这个问题能指导一下怎么解决吗本地编译是可以的
应用研发平台EMAS中设置的推送区域是哪里?
应用研发平台EMAS中设置的推送区域是哪里------这个在哪设置后台接入的时候报错这个移动端推送推送提示Specified access key is not found.\n是啥问题 设置的推送
应用研发平台EMAS中uniapp 如何判断厂商通道注册成功?
应用研发平台EMAS中uniapp 如何判断厂商通道注册成功应用在后台时消息推送不即时在后台2分钟id为9521827163103104appkey为334444472
51单片机实现俄罗斯方块游戏编程
设计了一款基于AT89C51单片机的俄罗斯方块游戏机,使用LCD12864液晶显示,按键控制方块移动与变形。游戏中,7种不同形状的方块随机下落,填满一行得分,满屏则游戏结束。包含电源、单片机最小系统、

应用研发平台EMAS中uniapp安装在线阿里云推送插件,为什么在线云打包,无法收到推送?
应用研发平台EMAS中uniapp安装在线阿里云推送插件为什么在线云打包可以收到推送在xcode离线工程获取设备推送id成功了但是无法收到推送请教一下
云计算与网络安全的融合之路:策略、挑战与未来展望
【5月更文挑战第13天】 随着数字化转型的不断深入,云计算已成为企业及个人存储和处理数据的首选平台。然而,云服务的广泛使用也引入了新的安全风险和挑战,尤其是在数据保护、隐私和合规性方面。本文探讨了云计
应用研发平台EMAS中这个是厂商特定字段,为什么你们文档没有说明可以怎么传?
应用研发平台EMAS中这个是厂商特定字段为什么你们文档没有说明可以怎么传参考图片华为内部拦截的规则没办法知道我们这边不好一一去过滤敏感词有可能需要借助审核平台过一下拦截
应用研发平台EMAS中可以传第三方通知内容审核平台的过去吗?
应用研发平台EMAS中可以传第三方通知内容审核平台的过去吗华为那边要求传递推必安审核结果才没有拦截。参考图片是这样子华为推送服务那边会拦截一些敏感词的通知比如涉政、色情、人体部位、社恐这些词汇他们内

