热门
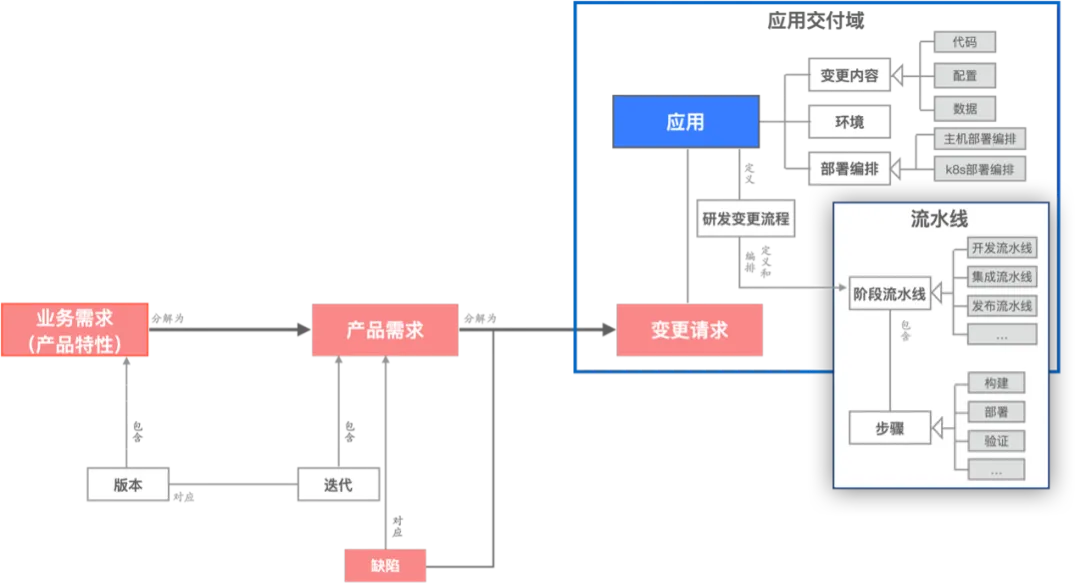
提升团队工程交付能力,从“看见”工程活动和研发模式开始
阿里云实时计算Flink的产品化思考与实践【下】
社区供稿 | FunASR 语音大模型在 Arm Neoverse 平台上的优化实践
更优性能与性价比,从自建 ELK 迁移到 SLS 开始
【linux进程信号(一)】信号的概念以及产生信号的方式
【linux进程间通信(二)】共享内存详解以及进程互斥概念
【项目日记(四)】第一层: 线程缓存的具体实现
【项目日记(三)】内存池的整体框架设计
【linux进程间通信(一)】匿名管道和命名管道
【linux基础I/O(二)】文件系统讲解以及文件缓冲区的概念
【linux基础I/O(一)】文件描述符的本质&重定向的本质
【C++高阶(九)】C++类型转换以及IO流
【C++高阶(八)】单例模式&特殊类的设计
【C++高阶(七)】C++异常处理的方式
【项目日记(二)】开胃菜--定长池的实现
【项目日记(一)】高并发内存池项目介绍
【C++11(三)】智能指针详解--RAII思想&循环引用问题
【C++11(二)】lambda表达式以及function包装器
【C++11(一)】右值引用以及列表初始化
【C++高阶(六)】哈希的应用--位图&布隆过滤器
【C++高阶(五)】哈希思想--哈希表&哈希桶
【AI Agent系列】【阿里AgentScope框架】实战1:利用AgentScope实现动态创建Agent和自由组织讨论
【C++高阶(四)】红黑树深度剖析--手撕红黑树!
【C++高阶(三)】AVL树深度剖析&模拟实现
PON系统“被动光网络”
【AI Agent系列】【阿里AgentScope框架】5. Pipeline模块的组合使用及Pipeline模块总结
【C++高阶(二)】熟悉STL中的map和set --了解KV模型和pair结构
【linux进程控制(三)】进程程序替换--如何自己实现一个bash解释器?
工作中常用的一些Linux指令,简单易记还实用(三)
【C++高阶(一)】二叉搜索树深度剖析
工作中常用的一些Linux指令,简单易记还实用(二)
【linux进程控制(二)】进程等待--父进程是如何等待子进程死亡的?
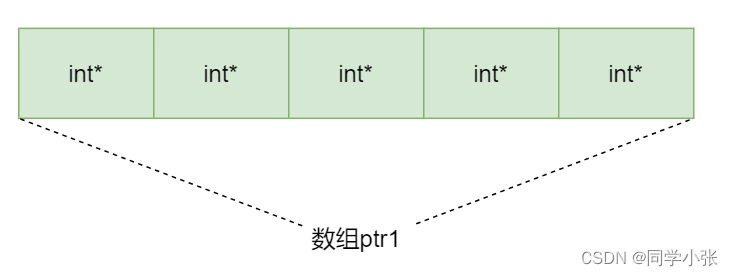
【重学C++】【指针】详解让人迷茫的指针数组和数组指针
工作中常用的一些Linux指令,简单易记还实用
【linux进程控制(一)】进程终止--如何干掉一个进程?
【linux进程(七)】程序地址空间深度剖析
【AI Agent系列】【阿里AgentScope框架】3. 深入源码:Pipeline模块如何组织多智能体间的数据流?- 顺序结构与条件分支
【linux进程(六)】环境变量再理解&程序地址空间初认识
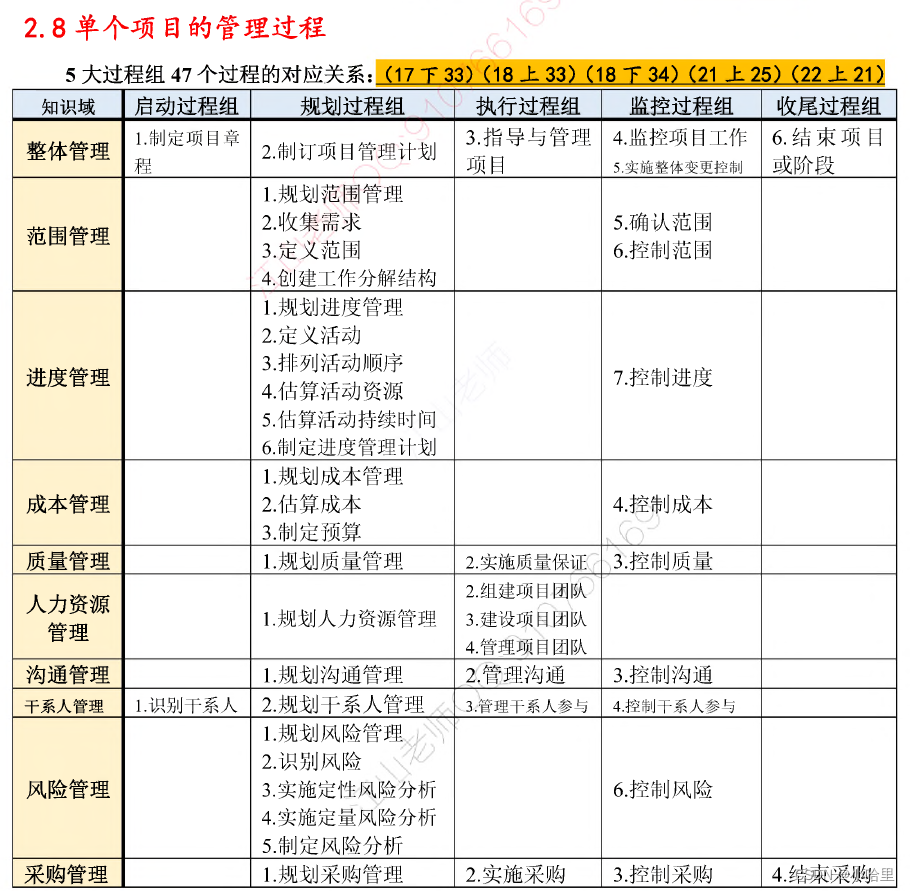
【高项】项目的概念,项目管理基础与立项管理
【C++进阶(九)】C++多态深度剖析
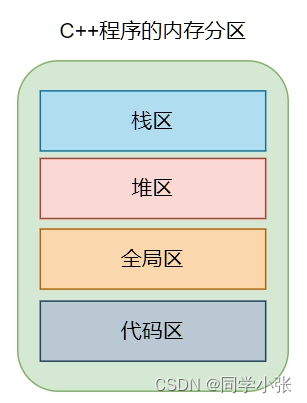
【重学C++】【内存】关于C++内存分区,你可能忽视的那些细节
下次老板问你MySQL如何优化时,你可以这样说,老板默默给你加工资
【C++进阶(八)】C++继承深度剖析
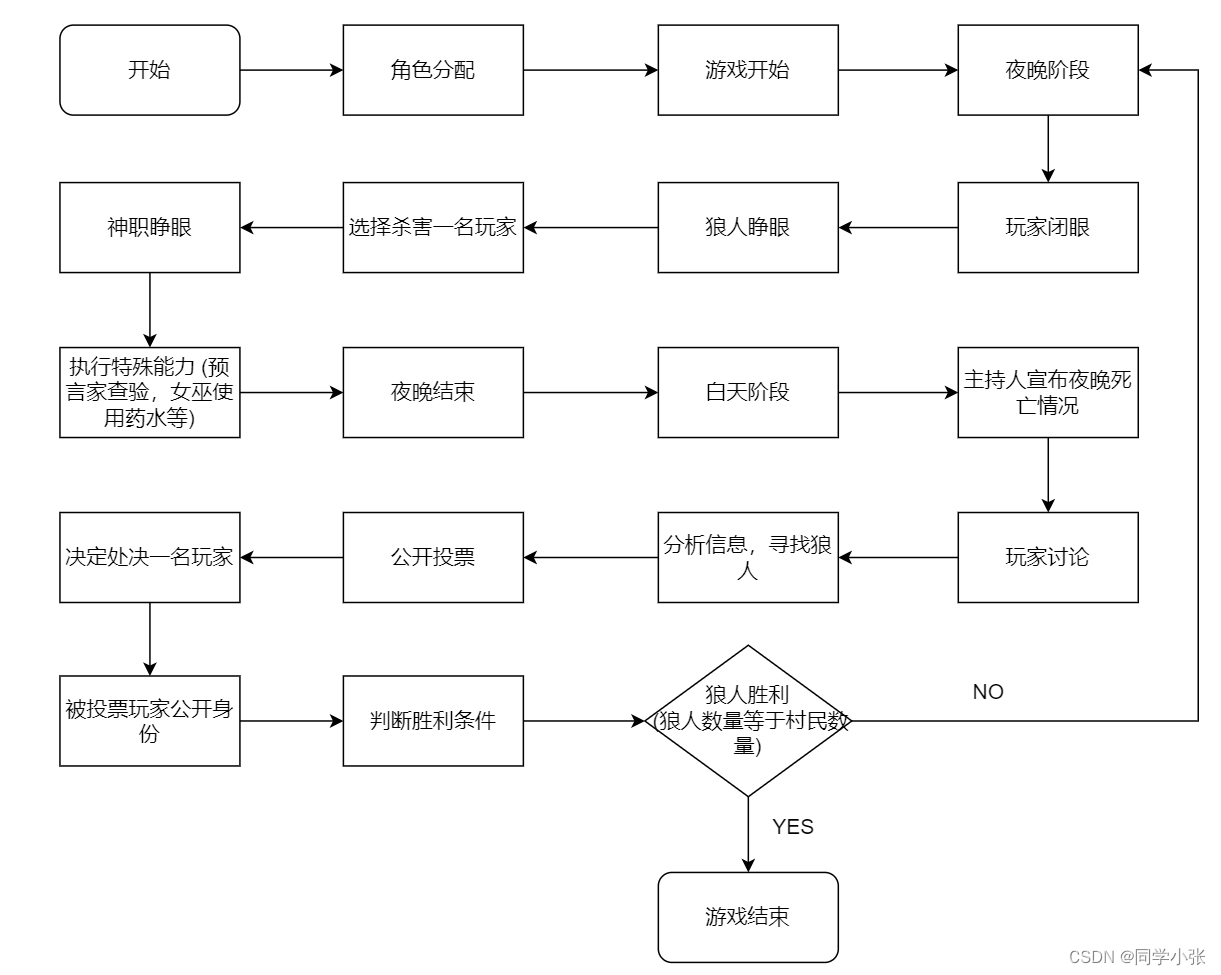
【AI Agent教程】【MetaGPT】案例拆解:使用MetaGPT实现“狼人杀“游戏(1)- 整体框架解析
【linux进程(五)】进程间切换以及环境变量问题
C++ 访问说明符详解:封装数据,控制访问,提升安全性
【linux进程(四)】僵尸进程和孤儿进程概念&进程优先级讲解
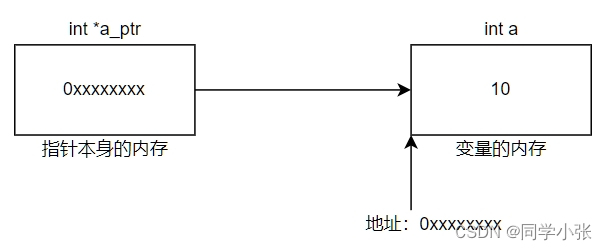
【重学C++】【指针】一文看透:指针中容易混淆的四个概念、算数运算以及使用场景中容易忽视的细节
【linux进程(三)】进程有哪些状态?--Linux下常见的三种进程状态
Keepalived集群软件高级使用(工作原理和状态通知)