图论总述
图的存储
图通常用G=(V,E)表示。V为顶点(vertex)集合,E为边(Edge)的集合。
图的物理存储,有两种方法。
1.邻接矩阵,就是二维数组,较直观,但不能存储重边。
2.邻接表,它是一种顺序与链式兼有的存储。
 n个顶点的连通图至少有多少条边?
n个顶点的连通图至少有多少条边?
答:至少要有(n-1)条边。对于简单图而言至多有n*(n-1)/2条边,此时即是完全图。
图的遍历
二部图
二部图:存在一种划分方法,将图G的顶点划分为两个集合A和B,使得图中任意一条边的两个邻接顶点分属不同的顶点集。
匹配:二部图中没有公共顶点的边集。边数最多的匹配叫最大匹配。若图中每个顶点都被匹配边邻接,叫完美匹配。
未盖点:不与任何匹配边邻接的顶点。
增广路:从未盖点出发,经非匹配边、匹配边、非匹配边......交替进行,最终以未盖点结尾,此路径叫增广路。在增广路中,把原匹配边与非匹配边对换,则得到的新匹配比原来的多一条边。
匈牙利算法:不断寻找增广路,最终得到最大匹配。
二部图最小覆盖:选择尽量少的点,使得图中每条边至少有一个端点被选中。可以证明,最小覆盖数=最大匹配数。
二部图的独立集:该集合中任意两点不相邻接。独立集中顶点个数=总顶点数-最大匹配中边的数目。
一个图G,若其顶点集V可划分为不相交的3个集合V1,V2,V3,使得不同集合的任意两点都邻接,但同一集合内的任意两点都不相邻,则称G为完全三部图。
网络流-概念
容量网络(capacity network):设G(V, A)是一个有向网络,在V 中指定了一个顶点,称为源点(记为Vs),以及另一个顶点,称为汇点(记为Vt);对于每一条弧<u, v>∈A,对应有一个权值c(u, v)>0,称为弧的容量(capacity)。通常把这样的有向网络G 称为容量网络。从源点到汇点的最大可行流叫最大流。
可行流(Valid Flow):可行流f(u,v)表示顶点u到顶点v的流量。
前向弧:原图中的弧。
反向弧:对前向弧取反。
增广路(augmenting path):
设f 是一个容量网络G 中的一个可行流,P 是从Vs 到Vt 的一条路径,若P 满足下列条件:
1) 在P 的所有前向弧<u, v>上,0 ≤ f(u, v) < c(u, v),即每一条弧都是非饱和弧;
2) 在P 的所有后向弧<u, v>上,0 < f(u, v) ≤ c(u, v),即每一条弧是非零流弧。
则称P 为关于可行流f 的一条增广路,简称为增广路。
增广-沿着增广路改进可行流的操作称为增广(augmenting)。
增广路P上的所有弧<u, v>上的流量按下述规则变化:(始终满足可行流的2 个条件)
a) 在前向弧<u, v>上,f(u, v) = f(u, v) +x;
b) 在后向弧<u, v>上,f(u, v) = f(u, v) -x。
x应该等于每条前向弧上的c(u, v)–f(u, v)与每条后向弧上的f(u, v)的最小值。即:
x=min{ min{c(u,v)-f(u,v)}, min{f(u,v)}}。
最小割最大流
割——对于图G=(V,E),对顶点集合V进行划分,分为S和T。其中源点s∈S,汇点t∈T,且T=V-S。则称(S,T)为一个割。割的容量定义为capacity(S,T)=∑capacity(u,v),其中u∈S,v∈T。
对于任意s-t流f,和任意s-t割(S,T),都有|f|<=capacity(S,T),因为流f必定跨过割中的若干条边。
当最后一条增广路被找到,下一次BFS找不到新的增广路时,把已标号的点看作集合S(对于其中的任意一点v都有a[v]>0),V-S看作T,此时的割就是最小割。
最小费用最大流
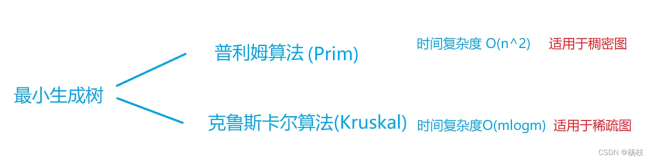
最小生成树
一个图的连通分量是该图的极大连通子图;而一个连通图的生成树是极小连通子图。若给边赋上权值,最小生成树就是权值和最小的生成树,算法有Prime与Kruskal。原图为G=(V,E);生成树G1=(V1,E1)。
Prime:
1.初始化,V1、E1都为空,任选一点v加入V1。
2.求出具有最小权值的边(u,v),u属于V1,v属于V-V1。将v加入V1并将此边加入E1。
3.不断重复步骤2 ,直至V1=V。
复杂度为O(n*n)。
Kruskal:
1.将边按照从小到大的次序排序。置V1=V。
2.顺序遍历每个边edge[i],若加入此边G1有环,则舍弃,否则加入E1。
复杂度为O(边数)。
最短路径
原图为G=(V,E),求s到任意顶点的最短路径。辅助数组dist[i]表示当前从源点s到顶点i的最短路径,辅助数组visited[ ]表示集合A。
1.初始化,置dist[i]=graph[s][i],A中只有s点。
2.找到具有最小值的dist[x],x属于V-A。x加入A,更新所有的dist[ y ],y属于V-A。更新步骤为 if(dist[x]+graph[x][y]<dist[y]) { dist [ y ]=dist[x]+graph[ x ] [ y ] }
3.不断重复步骤2 ,直至V=A。
拓扑排序
对一个有向无环图(Directed Acyclic Graph简称DAG)G进行拓扑排序,是将G中所有顶点排成一个线性序列,使得图中任意一条弧(u,v),顶点u在顶点v之前。基本思想见下。
1.统计所有顶点的入度。顶点x的入度即为弧的终点为指向顶点x的弧的条数。
2.寻找入度为0的顶点x,将其放入线性序列,并将该点从图中删除。
3.不断重复第二步,直至所有顶点输出。若顶点未完全输出却找不到入度为0的顶点,说明此图存在环,排序失败。