在今年的云栖大会上,阿里巴巴人工智能实验室除了发布AliGenie 3.0、服务机器人(天猫精灵太空蛋、太空梭)、天猫精灵车载版(TmallGenie auto),还重点推出了L4车路协同智能自动驾驶车。
阿里巴巴人工智能实验室总经理浅雪称,将利用感知基站,实现车与路对话,让自动驾驶进入车路协同智能时代。
在阿里巴巴人工智能实验室的构想中,不仅有聪明的车,还要有聪明的路。自动驾驶车+路侧“感知基站”+云控平台,实现云端、路端、车端一体的智能。其中,感知基站站得高看得远,具备多种传感器,分布在道路的关键节点。每个基站能照看到方圆400米范围内的路面,把路面情况、交通情况等提前告诉车辆,从而解决道路拥堵、交通险情提前预警等问题,给了智能交通一个“上帝视角”。
作为阿里巴巴自动驾驶的领军人物,阿里巴巴人工智能实验室首席科学家王刚在云栖大会上详细讲解了“车路协同”自动驾驶的探索与实践,以下为现场速记。

90秒看懂A.I. Labs智慧物流车和感知基站
各位嘉宾,上午好!我是王刚,我要介绍的是《自动驾驶:从单车智能跨到协同智能的进化》。可能在很多人的印象里,自动驾驶是一个非常新的研发领域。但其实不是这样的,如果我们翻开历史,会发现早在上世纪三四十年代的时候,美国就提出了自动驾驶概念车的理念,1984年的时候,cmu研发出了自动驾驶原型车,2004年的时候,就开始了百万美金的自动驾驶挑战赛,一直到现在。
看到这样悠久的自动驾驶历史,其实还是蛮有感慨的。为什么研发了这么久,我们还是没有看到完全无人的自动驾驶汽车产品出现,还是没有成功实现商业化落地?其中一个重要的原因当然是自动驾驶是一个非常困难的问题,但同时,我们也非常有必要去复盘,去思考,我们以往研发的技术路径方向是否是最优的,是否有可以提高的地方?带着这样的疑问,我们也进行了一些探索。
在过去的几十年里,我们数代人都专注于单车智能的研发。单车智能就是希望能让车自身具有感知,决策,控制等能力,能处理路上所有的情况,以实现安全驾驶。但单车智能真的能达到我们所期望的结果吗?带着这样的疑问,我们团队对单车智能系统进行了充分验证。单车智能的框架和模块,各个公司都比较相似,我这里就不详细介绍了。
在过去的一段时间里,为了进行验证,我们开发了业界领先的单车智能系统,比如我们能实现全场景全天候的厘米级的定位;我们建立了大规模的仿真平台,能每天进行数万公里的模拟和测试;在感知这个模块,大家知道KITTI数据库的竞赛在国际上是非常权威的,全世界的算法专家都在上面测试。我们也把研发的算法在上面进行了测试,发现我们是3D目标检测的第一名。这是我们感知系统的一部分,我们在系统架构以及工程优化上都进行了极致的研发。同时呢,在过去的两年里,我们单是在CVPR这个国际最顶尖的计算机视觉会议上就发表了12篇论文,这也充分说明了我们在算法上的先进性和前瞻性。我们把工程和算法做到了很好的结合,我可以非常自信和自豪的说我们的车载感知系统是业绩一流的感知系统。
基于这些先进的技术模块,我们开发了一整套自动驾驶系统,并且进行了反复的测试和验证。这是一个我们在云栖小镇,也就是我们会场外的开放道路进行测试的视频。大家可以看到,全程中我们的安全驾驶员是没有操控方向盘的。 这是一个非常非常典型的中国式的道路,有横冲直撞的自行车、有慢慢的机动车还有穿梭的行人以及路边停着随时准备启动的车辆。但我们的车能熟练的跟随、避让以及在十字路口的时候安全的汇入车道,这也表明我们的单车智能非常先进。
但即使是这样一个先进的单车智能系统,我们越测试,心里是越慌的。因为里面有很多问题,也就是大家所说的cornercase。并且很让人绝望的是,很多这样的corner case是在单车智能这样的技术路线下很难解决的。
这里我举几个例子吧。第一个例子是盲区和障碍物的遮挡,车上的传感器由于视角和高度的限制,总是有盲区的,并且如果路边有障碍物,它是不可能看到障碍物后面的情况,这样的限制在真实场景里有非常大的安全隐患;第二个限制是感知距离,现在大部分激光雷达的有效感知距离都在几十米左右,如果车速稍微高一点,前面有静止物体的时候根本来不及做出反应的。其他的一些问题包括高精度地图不能实时更新,决策规划无法得到完整的信息等等。这些问题都是单车智能技术上很难或者根本不可能克服的问题。
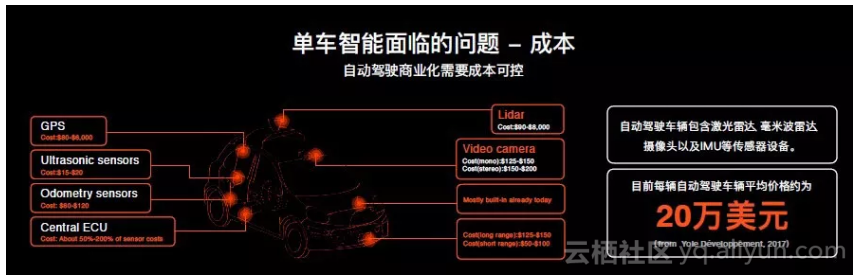
单车智能的另外一个问题是成本不可控,我们为了让车智能,需要给它配备非常多且昂贵的传感器单元。据法国的一个公司统计,2018年目前每辆自动驾驶汽车平均价格是20万美元,所以即使单车非常智能,但这样高昂的成本在落地上是非常困难的。
由于单车智能的这些局限,我们相信要想打造安全,经济的自动驾驶系统,我们不仅要研发聪明的车,也离不开研发聪明的道路和交通设施,让它们相互配合去实现自动驾驶。所以我们开发了车路协同的智能系统,我们称之为这样的系统为协同智能系统。
协同智能有什么好处呢?从安全角度来讲,很多单车智能很难处理的情况,通过智能的路和交通设施能非常容易的解决;刚才浅雪也提到了,我们通过建设道路,实际上可以共享智能能力,从成本角度来讲,通过集约式的建设智能的道路,让这样的能力被所有跑在路上的车所共享,我们能给车减配,降低车的成本,从而降低整个自动系统的成本。基于这样的两个原因,我们相信,在中国,乃至世界,自动驾驶的落地离不开协同智能的发展。
刚才讲到协同智能更安全,是协同智能能对单车智能的能力进行了全面升级。我们常说自动驾驶需要看,想,做,分别对应着感知,决策,和控制三个部分。其中感知和决策是最难的两个点。 单车智能的感知只是基于自身传感器,有盲区,有死角,而协同智能的看可以是基于路上的传感器网络,无死角,超远距离,所以我们称之为上帝视角;单车智能的决策只能基于自身的不完整信息来做,是无法考虑到别的车辆的,所以决策结果是局部最优;而协同智能能综合的考虑到所有的车的下一步的运动情况,从而做出全剧最优的决策结果。基于这样优势,协同智能可以实现非常好的驾驶安全性。
我们团队在非常早的时候就开始了协同智能的研发,我们现在的自动驾驶系统就是一个完整的协同智能系统。今天我想比较详细的介绍其中的感知部分,我们称之为上帝视角感知基站网络。
前面提到过车的传感器由于视角,高度,以及传感距离的限制,都存在很多局限,我们另辟蹊径,把车的传感单元装到了路上。左下角显示的就是我们装在云栖小镇路边的感知设备,我们命名为智能感知基站。这个智能感知基站能感知到交通场景里所有的信息,并发送给车。相对于车的传感器,我们的智能感知基站有什么优点呢?第一,它高瞻远瞩,因为位置高,视野广,所以几乎无死角,能有效处理遮挡;第二,它是静止在路边的,以静制动,所以在检测下面的移动物体的时候有很高的准确率;第三,感知基站不是孤立的,路上的感知基站可以形成网络,相互通信,从而它的感知距离可以达到无穷远,任何有感知基站的地方,我们的车都能感知到。这样的感知基站网络就犹如给自动驾驶开启了上帝视角,可以决胜千里之外。
基于以上的三个优点,我们认为这样的新型设备开启了3D视角,极大地的增强了感知的安全性。它包括了多模态的融合算法,开发出了基于网络的感知算法等等。我们致力于打造自动驾驶领域产品级的智能感知基站,它在精度,实时性,以及可靠性上都达到了很高的要求。例如,单个感知基站的检测范围大,我们在感知基站的算法上也进行了深度的研发,开发了非常先进的的多模态感知算法。另外在硬件设计上,我们也进行了工业级的设计,感知基站可以防雨、防雾,可以应对一切的天气情况。

我们把车和感知基站形成了非常好的融合,形成了一个高效统一的协同智能系统。下面这个video充分的显示了我们的协同智能的能力。其中银色的车是我们的自动驾驶汽车,紫红色的框表示车身传感器感知到的结果,绿色的框表示感知基站检测到的结果。大家可以看到路面上有一个障碍物,这个障碍物是行人,如果没有感知基站的帮助,车无法看到,但因为有了感知基站的帮助,车可以及时避让,极大地的提高了安全性。
我们还做了大量的实际测试,我们发现,即使车是在30公里/小时的速度下,如果突然冲出一个行人,100%会撞伤,但有了感知基站的帮助,我们实现了100%的成功避让率,这个例子充分证明了协同智能的威力。
同样重要的是,协同智能不仅更安全,还能更经济。截止到2017年底,全国汽车的保有量是3亿辆,假如我们要把这些车通过单车智能的方式全部变为自动驾驶汽车,这将是一个天文数字。而中国的公路里程只有400多万公里,其中的高频路段的里程更是少之又少,我们建设智能化道路,这个花费是非常少的,道路智能化后,我们可以给车减配,让车的成本大幅度降低,让整体的自动驾驶成本降低,从而让技术真正普惠大众。所以总体算起来,协同智能给自动驾驶能带来极大的总体成本的降低。
我们刚才提出来的道路智能化的方案不光能服务自动驾驶,也能服务现在人力驾驶的情况。比如提供安全警示、协助交通管控等等。打造整个智慧交通体系。
为了能持续的推动协同智能的研发工作,我们也非常荣幸和交通部公路院成立了车路协同联合实验室,双方紧密合作,去研发先真正能落地的车路协同技术;大家紧密合作,探索真正可以落地的协同智能系统。
最后,我想说协同智能的出现必将会造福全社会,因为有了更安全的驾驶、有了自动驾驶,可以降低交通的事故率,能够让出行和货物运输更高效。但同时这是非常复杂的工程,它需要政府、企业、院校通力协同合作,所以我们也非常愿意希望和更多的合作伙伴一起,携手共进,真正的改变这个行业,让中国的自动驾驶变得不一样。谢谢大家!
原文发布时间为:2018-09-27
本文作者:车路协同


