双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中,双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。
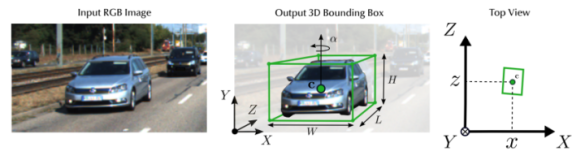
由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和被测物体之间构成一个三角形。已知两个摄像机之间的位置关系和物体在左右图像中的坐标,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。所以,双目视觉系统一般由两个摄像机构成。
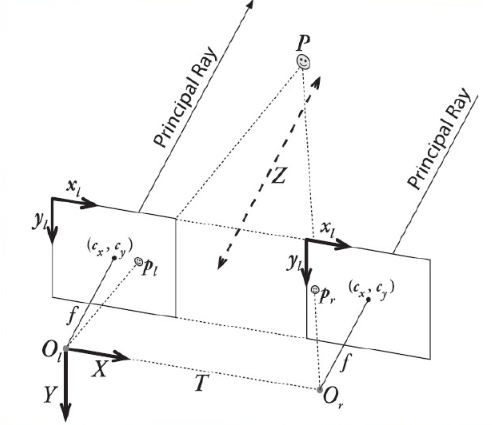
双目横向立体图
两个镜头的中心连线称为系统的基线,摄像机坐标系和世界坐标系重合,像平面和世界坐标系的XY是平行的。
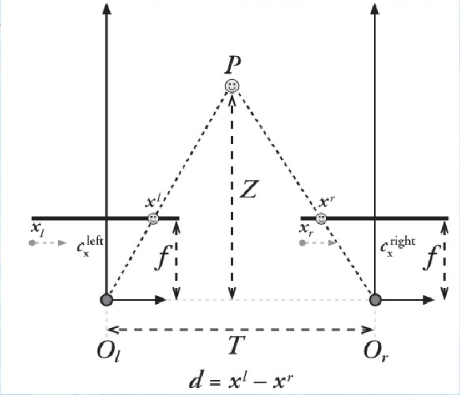
俯视图
可得方程:
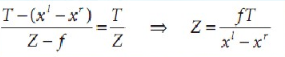
得出视差(xl-xr)与深度(Z)成反比
可以拿支笔放眼前,双眼交替睁闭,会发现笔的位置变化很大(即视差很大),再将笔放远点,双眼交替睁闭,会发现笔的位置变化变小了(即深度变大-->视差变小)
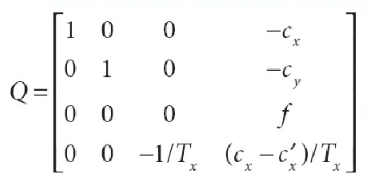
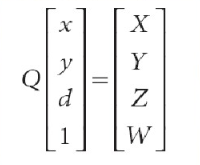
P的世界坐标为(X/W,Y/W,Z/W)