版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/zergskj/article/details/43892879
今天在一席上听了任教授的演讲后,很受启发,思路也陡然变得清晰很多。任教授的演讲真是非常浓缩,所有的东西都是点到为止。需要我们自己记录下来消化!
机器人懂得人类情感大致可分为如下三步:
1. 识别:
识别包括识别人类的表情、声音。这里包括对语境的判断和自然语言处理。这里分为两块:
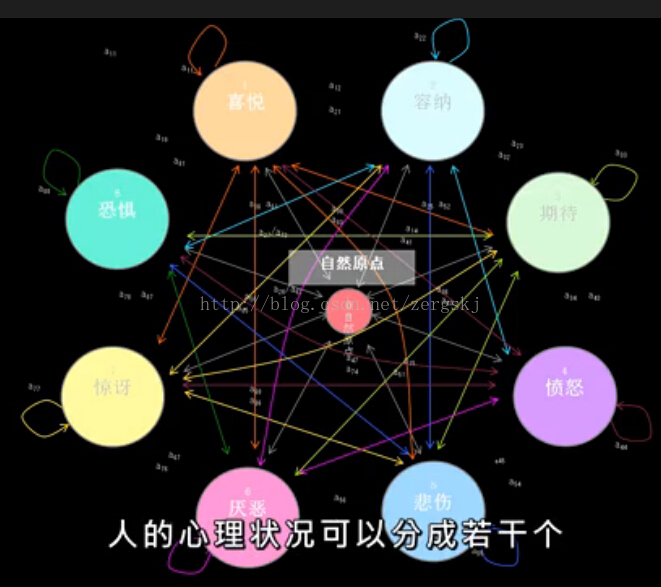
A.表情识别:表情的识别大致上可分为几种常见模式: 高兴、愉快、兴奋、愤怒……其中每种模式均可向另外的各种模式转换,但转换的概率是不同的,如下图所示:
 这里任教授对机器人的视觉识别有了更高的要求,不仅仅只是视觉单帧图像的识别了,而是连续图像的处理,这里对人类表情连续处理就叫做“情感计算”。也就是图像上下文的关联,这里给我们的视觉平台有所启发,机器人准确识别人类的表情需要的不仅仅是当下的静态图片,通常需要一组图片或视频集;
这里任教授对机器人的视觉识别有了更高的要求,不仅仅只是视觉单帧图像的识别了,而是连续图像的处理,这里对人类表情连续处理就叫做“情感计算”。也就是图像上下文的关联,这里给我们的视觉平台有所启发,机器人准确识别人类的表情需要的不仅仅是当下的静态图片,通常需要一组图片或视频集;
B.语气识别:语气也可分为几种常见模式,但语气的识别要难很多,这里任教授介绍的是中文自然语言处理技术,我在这里还可以补充一下,哈工大也正在做语气模式识别的课题,这个倒是可以合作一下,不仅仅只是从自然语言处理的角度去分析语义,更应让机器人真正听懂;
2.理解:
理解包括机器人对人类行为的综合分析,并准确判断出人类的情感状态。这里任教授提出了一个基于大数据的“丰心工学”模型,按字面意思理解就是丰富机器人的心灵,从技术角度理解就是收集海量的人类心理上的文字描述样本,最终也就是一个基于汉字的模式识别。
随着收集的文字信息越来越多,机器人的识别准确率就会越来越高。
3.反馈:
理解了人类的心思后,接下来就要做出响应, 这里任教授没有具体谈如何响应了。他给我们播放了他的人形机器人样机,这样从人类情感的角度更能很好的接受,看到了任教授的化身,感觉非常震撼!简直可以以假乱真了!但是反应还是略微有点慢,如下图所示:
 看完以后,我还是有几点困惑:
看完以后,我还是有几点困惑:
A.机器人的反应速度如何解决?
B.机器人的能源续航能力如何解决?
C.机器人的使用安全如何解决?(如果因为异常犯罪,这就非常有争议了!)
最后附上任教授的演讲优酷播放地址:
http://v.youku.com/v_show/id_XNzQyNDczODcy.html?f=22783846&sf=10102
机器人懂得人类情感大致可分为如下三步:
1. 识别:
识别包括识别人类的表情、声音。这里包括对语境的判断和自然语言处理。这里分为两块:
A.表情识别:表情的识别大致上可分为几种常见模式: 高兴、愉快、兴奋、愤怒……其中每种模式均可向另外的各种模式转换,但转换的概率是不同的,如下图所示:
B.语气识别:语气也可分为几种常见模式,但语气的识别要难很多,这里任教授介绍的是中文自然语言处理技术,我在这里还可以补充一下,哈工大也正在做语气模式识别的课题,这个倒是可以合作一下,不仅仅只是从自然语言处理的角度去分析语义,更应让机器人真正听懂;
2.理解:
理解包括机器人对人类行为的综合分析,并准确判断出人类的情感状态。这里任教授提出了一个基于大数据的“丰心工学”模型,按字面意思理解就是丰富机器人的心灵,从技术角度理解就是收集海量的人类心理上的文字描述样本,最终也就是一个基于汉字的模式识别。
随着收集的文字信息越来越多,机器人的识别准确率就会越来越高。
3.反馈:
理解了人类的心思后,接下来就要做出响应, 这里任教授没有具体谈如何响应了。他给我们播放了他的人形机器人样机,这样从人类情感的角度更能很好的接受,看到了任教授的化身,感觉非常震撼!简直可以以假乱真了!但是反应还是略微有点慢,如下图所示:
A.机器人的反应速度如何解决?
B.机器人的能源续航能力如何解决?
C.机器人的使用安全如何解决?(如果因为异常犯罪,这就非常有争议了!)
最后附上任教授的演讲优酷播放地址:
http://v.youku.com/v_show/id_XNzQyNDczODcy.html?f=22783846&sf=10102