来自卡耐基梅隆大学 (CMU) 的四个科学家,在一篇论文里说,他们带着一群机器人去住Airbnb了。
也不知道,近来忙于应付纽约市政府的Airbnb,能不能感受到这一缕清风。
回归正片,研究人员自然不是请机器人去度假。
他们觉得,机器人常年待在实验室里,生活场景很单调,和现实也有差距。

这样的话,训练出来的技能,很难推广到真实世界里去。
只能在实验室做任务的机器人,也不是CMU的人类们想要的。
“经济适用”机
团队决定,让机器人参与更多的实战,培养它们泛化能力。

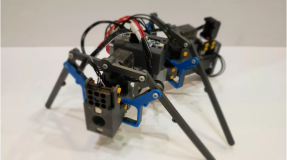
于是,人们先造了一批“便宜”的机器人,就是把Dobot Magician机械臂改造了一下——
加上了双轴手腕,两指电动夹具,还有移动底座。
传感器方面,配置了英特尔R200 RGB摄像头,以及帮摄像头转脖子的云台。

至于机器人的大脑,笔记本而已,CPU是i5-8250U,RAM有8G。
研究人员说,每台“只要”三千美元,比别的 (两万美元的) 机器人经济多了。
“经济适用”房
然后,带机器人去开房。

△ 仔细选择的不同环境
研究人员先在Airbnb上,开了六套房,是收集真实数据用的。
就像刚才说的,只用实验室环境里的数据来训练,就不是真正的训练。
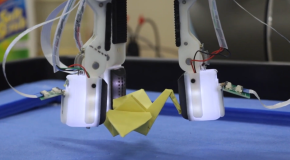
他们用Yolo模型做物体检测,然后用“Robust-Grasp (鲁棒抓取) ”神经网络结构 (详见下文) ,来算出最佳的抓取姿势。
就这样,一共收集了28,000种不同的姿势。
自制的数据集,取名为Home-LCA,后面三个字母,指的是“便宜的机械臂”。
机智的决策
刚才,简要登场的“Robust-Grasp”神经网络,就是机器人做出机智抓取决策的关键。

结构分成三部分——
一是抓取预测网络 (GPN) ,这里用的是训练好的ResNet-18。吃进像素图 (Pixel Imagery) ,再决定用什么姿势抓取。
不过,用了便宜的机器人,收集的数据会有很多噪音,所以……
二是噪音建模网络 (NMN) ,根据场景图像和机器人获取的信息这两组数据,把噪音分离出去。
三是边缘化层 (Marginalization Layer) ,把两股数据流结合起来,以便给出更好的决策。
团队用自制的Home-LCA数据集,训练了这个网络,也用两个实验室数据集做陪练,看哪边效果好。
实战派vs温室派
训练完成之后,研究人员又在Airbnb上面,另外开了3套房,作为赛场。
所以说,赛前谁都没有到过这些地方。

△ 不知文中为何只有两间测试房的照片
真正的抓取比赛开始了,参赛双方分别是:
实战派,用Home-LCA训练的AI。
温室派,用Lab-Baxter训练的AI。

△ 三个新房子
同在陌生的环境里,抓取陌生的物体,实战派机器人的成功率远远超过温室派。
这并不意外,毕竟在那之前,选手们还进行了另外一项比赛——
机器人做随性抓取,AI来预测能不能抓取成功 (依靠位置和角度) 。

△ 横向对比,当训练集与测试集来源不同,便知其泛化能力
结果,用Home-LCA数据集训练的模型,在接受其他两个数据集的测试时,预测正确率并没有明显差异,一直保持在70%上下 (见第3、5行) 。
而用Lab-Baxter和Lab-LCA数据集训练的模型,换其他数据集测试,预测正确率便会从70%左右,下降至55%左右 (见第1、2、4行) 。

△ 占卜婆婆
也就是说,实战派处变不惊,泛化能力稳胜一筹。
野生,野长
果然,从模型训练开始,就不能对机器人太温柔。
不管是在模拟器里修炼的机器人,还是用实验室数据喂养的机器人,都容易对外界的艰险适应不能。

△ 到外面去吧
采集真实世界的数据,来训练机器人的实际操作技能,它们便不会被困在实验室里,寸步难行。
大概,这就是CMU在机器人能力的泛化上,为同仁们提供的一个思路吧。
论文传送门:
https://arxiv.org/pdf/1807.07049.pdf
原文发布时间为:2018-07-28
本文来自云栖社区合作伙伴“量子位”,了解相关信息可以关注“量子位”。