按照之前的思路,我们依旧来对比一下普通的逐帧 softmax 和 CRF 的异同。
逐帧softmax
CRF 主要用于序列标注问题,可以简单理解为是给序列中的每一帧都进行分类,既然是分类,很自然想到将这个序列用 CNN 或者 RNN 进行编码后,接一个全连接层用 softmax 激活,如下图所示:
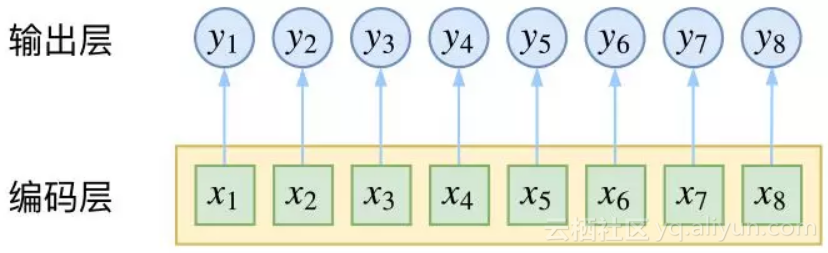
▲ 逐帧softmax并没有直接考虑输出的上下文关联
条件随机场
然而,当我们设计标签时,比如用 s、b、m、e 的 4 个标签来做字标注法的分词,目标输出序列本身会带有一些上下文关联,比如 s 后面就不能接 m 和 e,等等。逐标签 softmax 并没有考虑这种输出层面的上下文关联,所以它意味着把这些关联放到了编码层面,希望模型能自己学到这些内容,但有时候会“强模型所难”。
而 CRF 则更直接一点,它将输出层面的关联分离了出来,这使得模型在学习上更为“从容”:
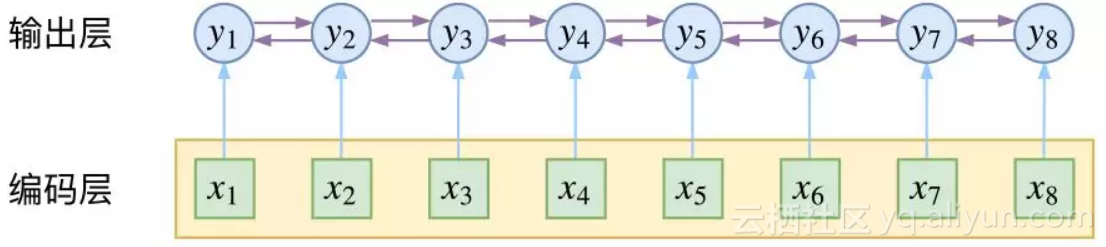
▲ CRF在输出端显式地考虑了上下文关联
数学
当然,如果仅仅是引入输出的关联,还不仅仅是 CRF 的全部,CRF 的真正精巧的地方,是它以路径为单位,考虑的是路径的概率。
模型概要
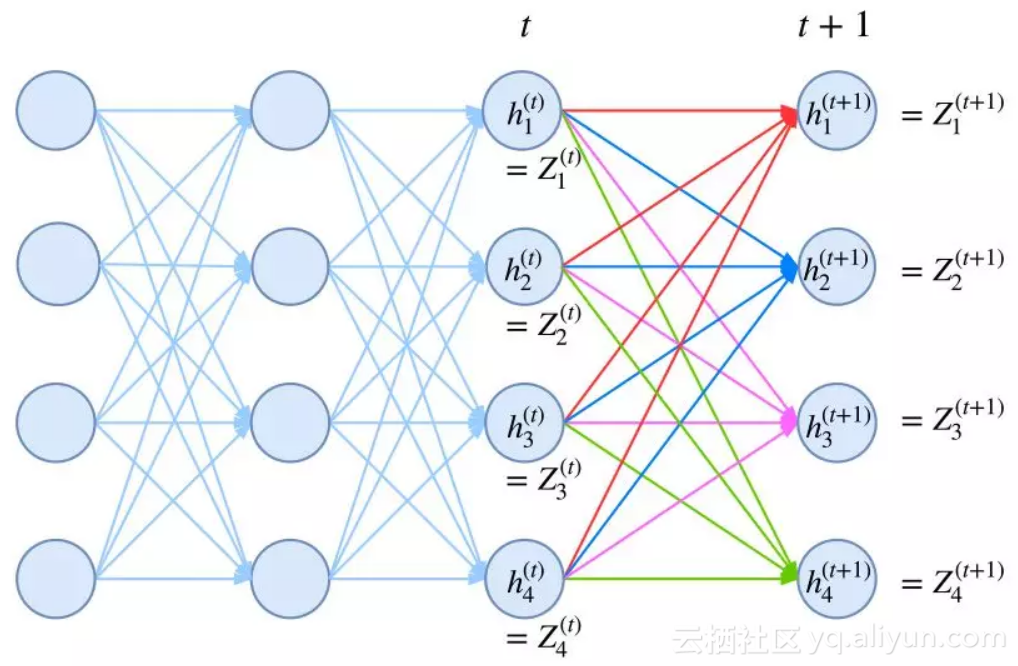
假如一个输入有 n 帧,每一帧的标签有 k 中可能性,那么理论上就有k^n中不同的输入。我们可以将它用如下的网络图进行简单的可视化。在下图中,每个点代表一个标签的可能性,点之间的连线表示标签之间的关联,而每一种标注结果,都对应着图上的一条完整的路径。
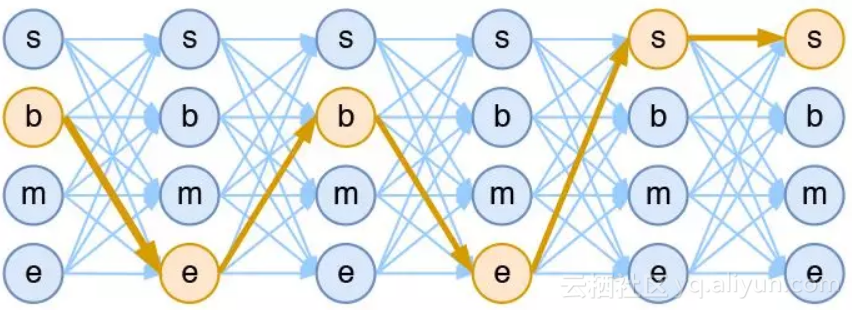
▲ 4tag分词模型中输出网络图
而在序列标注任务中,我们的正确答案是一般是唯一的。比如“今天天气不错”,如果对应的分词结果是“今天/天气/不/错”,那么目标输出序列就是 bebess,除此之外别的路径都不符合要求。
换言之,在序列标注任务中,我们的研究的基本单位应该是路径,我们要做的事情,是从 k^n 条路径选出正确的一条,那就意味着,如果将它视为一个分类问题,那么将是 k^n 类中选一类的分类问题。
这就是逐帧 softmax 和 CRF 的根本不同了:前者将序列标注看成是 n 个 k 分类问题,后者将序列标注看成是 1 个 k^n 分类问题。
具体来讲,在 CRF 的序列标注问题中,我们要计算的是条件概率:
![]()
为了得到这个概率的估计,CRF 做了两个假设:
假设一:该分布是指数族分布。
这个假设意味着存在函数 f(y1,…,yn;x),使得:
![]()
其中 Z(x) 是归一化因子,因为这个是条件分布,所以归一化因子跟 x 有关。这个 f 函数可以视为一个打分函数,打分函数取指数并归一化后就得到概率分布。
假设二:输出之间的关联仅发生在相邻位置,并且关联是指数加性的。
这个假设意味着 f(y1,…,yn;x) 可以更进一步简化为:

这也就是说,现在我们只需要对每一个标签和每一个相邻标签对分别打分,然后将所有打分结果求和得到总分。
线性链CRF
尽管已经做了大量简化,但一般来说,(3) 式所表示的概率模型还是过于复杂,难以求解。于是考虑到当前深度学习模型中,RNN 或者层叠 CNN 等模型已经能够比较充分捕捉各个 y 与输出 x 的联系,因此,我们不妨考虑函数 g 跟 x 无关,那么:

这时候 g 实际上就是一个有限的、待训练的参数矩阵而已,而单标签的打分函数 h(yi;x) 我们可以通过 RNN 或者 CNN 来建模。因此,该模型是可以建立的,其中概率分布变为:

这就是线性链 CRF 的概念。
归一化因子
为了训练 CRF 模型,我们用最大似然方法,也就是用:
![]()
作为损失函数,可以算出它等于:

其中第一项是原来概率式的分子的对数,它目标的序列的打分,虽然它看上去挺迂回的,但是并不难计算。真正的难度在于分母的对数 logZ(x) 这一项。
归一化因子,在物理上也叫配分函数,在这里它需要我们对所有可能的路径的打分进行指数求和,而我们前面已经说到,这样的路径数是指数量级的(k^n),因此直接来算几乎是不可能的。
事实上,归一化因子难算,几乎是所有概率图模型的公共难题。幸运的是,在 CRF 模型中,由于我们只考虑了临近标签的联系(马尔可夫假设),因此我们可以递归地算出归一化因子,这使得原来是指数级的计算量降低为线性级别。
具体来说,我们将计算到时刻 t 的归一化因子记为 Zt,并将它分为 k 个部分:
![]()
其中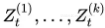 分别是截止到当前时刻 t 中、以标签 1,…,k 为终点的所有路径的得分指数和。那么,我们可以递归地计算:
分别是截止到当前时刻 t 中、以标签 1,…,k 为终点的所有路径的得分指数和。那么,我们可以递归地计算:
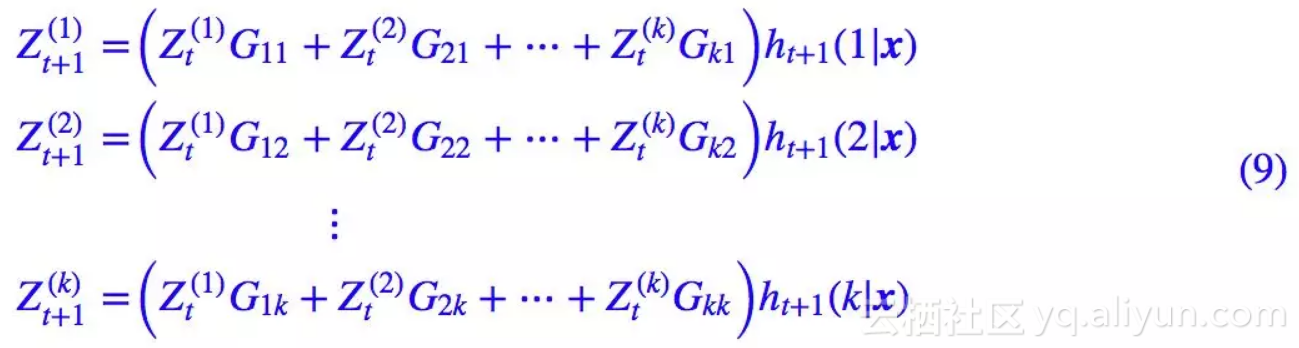
它可以简单写为矩阵形式:
![]()
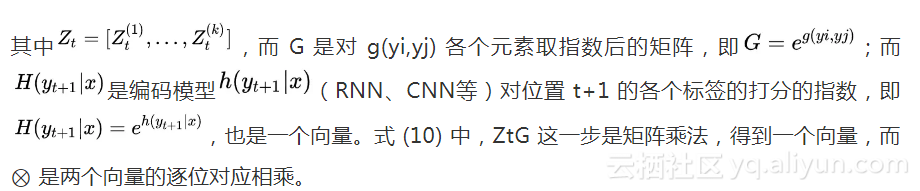
▲ 归一化因子的递归计算图示。从t到t+1时刻的计算,包括转移概率和j+1节点本身的概率
如果不熟悉的读者,可能一下子比较难接受 (10) 式。读者可以把 n=1,n=2,n=3 时的归一化因子写出来,试着找它们的递归关系,慢慢地就可以理解 (10) 式了。
动态规划
写出损失函数 −logP(y1,…,yn|x) 后,就可以完成模型的训练了,因为目前的深度学习框架都已经带有自动求导的功能,只要我们能写出可导的 loss,就可以帮我们完成优化过程了。
那么剩下的最后一步,就是模型训练完成后,如何根据输入找出最优路径来。跟前面一样,这也是一个从 k^n 条路径中选最优的问题,而同样地,因为马尔可夫假设的存在,它可以转化为一个动态规划问题,用 viterbi 算法解决,计算量正比于 n。
动态规划在本博客已经出现了多次了,它的递归思想就是:一条最优路径切成两段,那么每一段都是一条(局部)最优路径。在本博客右端的搜索框键入“动态规划”,就可以得到很多相关介绍了,所以不再重复了。
实现
经过调试,基于 Keras 框架下,笔者得到了一个线性链 CRF 的简明实现,这也许是最简短的 CRF 实现了。这里分享最终的实现并介绍实现要点。
实现要点
前面我们已经说明了,实现 CRF 的困难之处是 −logP(y1,…,yn|x) 的计算,而本质困难是归一化因子部分 Z(x) 的计算,得益于马尔科夫假设,我们得到了递归的 (9) 式或 (10) 式,它们应该已经是一般情况下计算 Z(x) 的计算了。
那么怎么在深度学习框架中实现这种递归计算呢?要注意,从计算图的视角看,这是通过递归的方法定义一个图,而且这个图的长度还不固定。这对于 PyTorch这样的动态图框架应该是不为难的,但是对于TensorFlow或者基于 TensorFlow 的 Keras 就很难操作了(它们是静态图框架)。
不过,并非没有可能,我们可以用封装好的 RNN 函数来计算。我们知道,RNN 本质上就是在递归计算
![]()
新版本的 TensorFlow 和 Keras 都已经允许我们自定义 RNN 细胞,这就意味着函数 f 可以自行定义,而后端自动帮我们完成递归计算。于是我们只需要设计一个 RNN,使得我们要计算的 Z 对应于 RNN 的隐藏向量。
这就是 CRF 实现中最精致的部分了。
至于剩下的,是一些细节性的,包括:
1. 为了防止溢出,我们通常要取对数,但由于归一化因子是指数求和,所以实际上是 这样的格式,它的计算技巧是:
这样的格式,它的计算技巧是:

TensorFlow 和 Keras 中都已经封装好了对应的 logsumexp 函数了,直接调用即可;
2. 对于分子(也就是目标序列的得分)的计算技巧,在代码中已经做了注释,主要是通过用“目标序列”点乘“预测序列”来实现取出目标得分;
3. 关于变长输入的 padding 部分如何进行 mask?我觉得在这方面 Keras 做得并不是很好。
为了简单实现这种 mask,我的做法是引入多一个标签,比如原来是 s、b、m、e 四个标签做分词,然后引入第五个标签,比如 x,将 padding 部分的标签都设为 x,然后可以直接在 CRF 损失计算时忽略第五个标签的存在,具体实现请看代码。
代码速览
纯 Keras 实现的 CRF 层,欢迎使用。
# -*- coding:utf-8 -*-
from keras.layers import Layer
import keras.backend as K
class CRF(Layer):
"""纯Keras实现CRF层
CRF层本质上是一个带训练参数的loss计算层,因此CRF层只用来训练模型,
而预测则需要另外建立模型。
"""
def __init__(self, ignore_last_label=False, **kwargs):
"""ignore_last_label:定义要不要忽略最后一个标签,起到mask的效果
"""
self.ignore_last_label = 1 if ignore_last_label else 0
super(CRF, self).__init__(**kwargs)
def build(self, input_shape):
self.num_labels = input_shape[-1] - self.ignore_last_label
self.trans = self.add_weight(name='crf_trans',
shape=(self.num_labels, self.num_labels),
initializer='glorot_uniform',
trainable=True)
def log_norm_step(self, inputs, states):
"""递归计算归一化因子
要点:1、递归计算;2、用logsumexp避免溢出。
技巧:通过expand_dims来对齐张量。
"""
states = K.expand_dims(states[0], 2) # (batch_size, output_dim, 1)
trans = K.expand_dims(self.trans, 0) # (1, output_dim, output_dim)
output = K.logsumexp(states+trans, 1) # (batch_size, output_dim)
return output+inputs, [output+inputs]
def path_score(self, inputs, labels):
"""计算目标路径的相对概率(还没有归一化)
要点:逐标签得分,加上转移概率得分。
技巧:用“预测”点乘“目标”的方法抽取出目标路径的得分。
"""
point_score = K.sum(K.sum(inputs*labels, 2), 1, keepdims=True) # 逐标签得分
labels1 = K.expand_dims(labels[:, :-1], 3)
labels2 = K.expand_dims(labels[:, 1:], 2)
labels = labels1 * labels2 # 两个错位labels,负责从转移矩阵中抽取目标转移得分
trans = K.expand_dims(K.expand_dims(self.trans, 0), 0)
trans_score = K.sum(K.sum(trans*labels, [2,3]), 1, keepdims=True)
return point_score+trans_score # 两部分得分之和
def call(self, inputs): # CRF本身不改变输出,它只是一个loss
return inputs
def loss(self, y_true, y_pred): # 目标y_pred需要是one hot形式
mask = 1-y_true[:,1:,-1] if self.ignore_last_label else None
y_true,y_pred = y_true[:,:,:self.num_labels],y_pred[:,:,:self.num_labels]
init_states = [y_pred[:,0]] # 初始状态
log_norm,_,_ = K.rnn(self.log_norm_step, y_pred[:,1:], init_states, mask=mask) # 计算Z向量(对数)
log_norm = K.logsumexp(log_norm, 1, keepdims=True) # 计算Z(对数)
path_score = self.path_score(y_pred, y_true) # 计算分子(对数)
return log_norm - path_score # 即log(分子/分母)
def accuracy(self, y_true, y_pred): # 训练过程中显示逐帧准确率的函数,排除了mask的影响
mask = 1-y_true[:,:,-1] if self.ignore_last_label else None
y_true,y_pred = y_true[:,:,:self.num_labels],y_pred[:,:,:self.num_labels]
isequal = K.equal(K.argmax(y_true, 2), K.argmax(y_pred, 2))
isequal = K.cast(isequal, 'float32')
if mask == None:
return K.mean(isequal)
else:
return K.sum(isequal*mask) / K.sum(mask)
除去注释和 accuracy 的代码,真正的 CRF 的代码量也就 30 行左右,可以说跟哪个框架比较都称得上是简明的 CRF 实现了。
用纯 Keras 实现一些复杂的模型,是一件颇有意思的事情。目前仅在 TensorFlow 后端测试通过,理论上兼容 Theano、CNTK 后端,但可能要自行微调。
使用案例
我的 Github 中还附带了一个使用 CNN+CRF 实现的中文分词的例子,用的是 Bakeoff 2005 语料,例子是一个完整的分词实现,包括 viterbi 算法、分词输出等。
Github地址:https://github.com/bojone/crf/
相关的内容还可以看我之前的文章:
中文分词系列:基于双向LSTM的seq2seq字标注 [2]
中文分词系列:基于全卷积网络的中文分词 [3]
结语
终于介绍完了,希望大家有所收获,也希望最后的实现能对大家有所帮助。
原文发布时间为:2018-05-22
本文作者:苏剑林
本文来自云栖社区合作伙伴“PaperWeekly”,了解相关信息可以关注“PaperWeekly”。