ALVIX概念无人机采用圆筒状机身,旋转收纳后,造型一体,体积轻巧。

无人机技术的应用前景一直是备受关注的一个话题。最早的无人机是作为航拍的工具,以“上帝视角”记录令人惊叹的航拍照片和视频。而后随着技术的不断进步,无人机的应用范围越来越广。为了方便极限运动爱好者或冒险家使用无人机,近日,外国研发人员带来了一款全新的无人机ALVIX,其采用双旋翼设计,机身显得更灵活紧凑。
除此之外,研发者还在无人机上安装了一个微型动态监控摄像机,通过每秒记录一百幅画面来辅助处理器快速做出反应,不仅告诉无人机它们自己的位置和障碍物的具体位置,甚至遇到障碍物突然移动的情况,处理器也可以快速预测怎么才能最有效地钻过去。
而环形结构恰好提高了机身的防撞性,同时完整包覆并保护旋翼,能有效抵御外在碰撞,最大程度避免炸机。

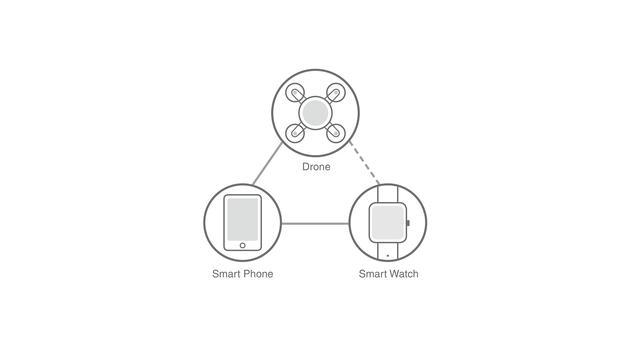
当然,它也可以与智能手表与手机相连接,当用户处于运动状态时,用智能手表也可以进行基本功能,而不需要为了拿着手机而限制行动。此外,如果遇到紧急情况,ALVIX无人机也会通过手机或手表触发内置的警报系统,让机身发出亮光及警报声,以此来提醒用户。
原文发布时间:
2018-03-02 09:22
本文作者:
巫盼
本文来自云栖社区合作伙伴镁客网,了解相关信息可以关注镁客网。
