图像采集卡对于工业和科研应用,其目标是从初始的视频信号获取一幅精确的数字图像。机器视觉检测设备上的图像采集卡主要是由视频输入、A/D转换、时序及采集控制、图像处理、总线接口及控制、输出及控制等几大模块构成的。
作为自用产品配件,这类应用以实现所要达到的要求为先,选择采集卡要特别注意功能的全面性,以应付各种突发情况。机器视觉检测系统中工业相机种类的不同,在选择图像采集卡时也应有所不同。在选择时更要关注卡的稳定性、价格、功能等和产品成本息息相关的因素。
图像采集卡
下面机器视觉公司朗锐智科(www.loongv.com)介绍一些图像采集卡的选购常识。
色彩模式
图像采集卡色彩模式主要是指彩色模式和黑白模式。通常对人眼来说,彩色的图像要显得真实、自然。既然彩色的看起来好的多了,为什么还要黑白的呢?彩色图像卡通常用在多媒体类的应用中,主要是为了使人眼看起来舒服的图像,为了实现这一目的,多媒体图像卡会自动调整图像来改进外观,这些调整所产生的美观图像不需要多少后续的处理,而这正是出版所需要的。
如果工业相机若是黑白的,可以选择黑白图像采集卡,当然,由于彩色图像采集卡也可以采集同灰度级别的黑白图像,因此,也可以选择彩色图像采集卡。但是,若相机为彩色的,就只能选择彩色图像采集卡;
信号类型
确定自己所使用的信号源类型。对视频不够了解的人,就觉得买一个视频采集卡,还分什么不同的信号源,觉得奇怪,信号源从硬件上分,高清一般有:HDV、HDMI、DVI、SDI、VGA、分量等,标清一般有:DV(1394)、CVBS(AV)、SVIDEO、RGB分量、SDI等不同的信号源设备。信号可以是摄像头也可以是播放器,也可以是电脑或其它的设备。
但总的来说就是说模拟信号接模拟采集卡;数字信号接数字采集卡。
相机若是模拟相机,所采用的图像采集卡也相应的是模拟图像采集卡。而与数字相机所配套使用的图像采集卡,则应是数字图像采集卡;
还有,线扫描图像采集卡既支持线扫描相机,又支持面扫描相机。而面扫描图像采集卡一般只支持面扫描相机,而不支持线扫描相机。还有其他注意事项。
图像采集卡的最终目的是将图像采集到计算机中供计算机处理,那么选择卡之前一定要知道你买这个卡具体用来做什么,是用来监控、视频会议、广电录播、专业非编、医疗CT、工业检测还是其他应用。
视觉检测图像采集卡选型及具体应用
2018-05-16
1433
版权
版权声明:
本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《
阿里云开发者社区用户服务协议》和
《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写
侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
简介:

目录
相关文章
|
4月前
|
机器学习/深度学习
算法
API
|
4月前
|
传感器
编解码
计算机视觉
事件相机 PROPHESEE EVK4紧凑基于事件的 高清视觉评估套件 视觉传感 EVK4
探索基于事件的视觉,从 PROPHESEE EVK4 HD 开始。这款超轻、紧凑的高清 Metavision ®评估套件,可承受现场测试条件。集成 IMX636(高清),堆叠式事件视觉传感器由索尼半导体解决方案公司发布,由索尼和 PROPHESEE 合作实现。
91
0
0

|
6月前
|
机器学习/深度学习
人工智能
计算机视觉
|
9月前
|
监控
算法
vr&ar
鱼眼矫正,实时视频与3D的融合案例分享
#鱼眼摄像头画面矫正及与3D融合
鱼眼摄像头是一种广角镜头,捕捉的视频画面呈现出弯曲或球形。通过鱼眼矫正算法,可以将鱼眼相机拍摄的视频转换为更接近于标准透视的视频,使用户能够直接获得更自然的视频效果。
经过鱼眼矫正后的实时视频,适用于与3D场景实时融合,即视频孪生 = 视频+数字孪生。
视频孪生是现阶段数字孪生的天花板。将分散、割裂的实时视频在数字孪生世界中做三维还原,虚实共生,虚实互补,为用户提供立体、直观、实时真实的动态的系统。只有通过动态的视频,才能实现真正的虚实共生。
222
0
0
|
11月前
|
机器学习/深度学习
人工智能
中间件
智能图像分析-人像修复增强-艾科瑞特科技
智能图像分析-人像修复增强-艾科瑞特科技
艾科瑞特科技(iCREDIT)-全球最大的第三方软件中间件服务商
艾科瑞特科技官网:https://www.icredit.link
艾科瑞特科技云市场:https://market.icredit.link
艾科瑞特科技-Apifox-API Hub:https://apihub.icredit.link
1637
1
1
|
机器学习/深度学习
人工智能
文字识别
|
传感器
机器学习/深度学习
编解码
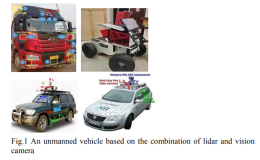
激光雷达与视觉联合标定综述!(系统介绍/标定板选择/在线离线标定等)
由于2D识别的成功,论文引入了一个大型基准,称为OMNI3D,重新审视了3D目标检测的任务。OMNI3D对现有数据集进行了重新利用和组合,生成了234k张图像,标注了300多万个实例和97个类别。由于相机内参的变化以及场景和目标类型的丰富多样性,这种规模的3D检测具有挑战性。论文提出了一个名为Cube R-CNN的模型,旨在通过统一的方法在摄像机和场景类型之间进行泛化。结果表明,在更大的OMNI3D和现有基准上,Cube R-CNN优于先前的工作。最后,论文证明了OMNI3D是一个强大的3D目标识别数据集,表明它提高了单个数据集的性能,并可以通过预训练加速对新的较小数据集的学习。
883
0
0
|
传感器
机器学习/深度学习
数据采集
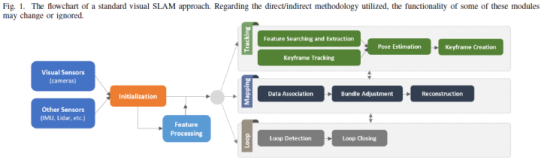
2022最新!视觉SLAM综述(多传感器/姿态估计/动态环境/视觉里程计)(上)
论文调查的主要目的是介绍VSLAM系统的最新进展,并讨论现有的挑战和未来趋势。论文对在VSLAM领域发表的45篇有影响力的论文进行了深入的调查,并根据不同的特点对这些方法进行了分类,包括novelty domain、目标、采用的算法和语义水平。最后论文讨论了当前的趋势和未来的方向,有助于研究人员进行研究。
844
0
0
|
机器学习/深度学习
存储
监控

|
传感器
算法
计算机视觉