对于多足机器人的实际生活应用,在王兴兴看来还有待更多的技术进步。
众所周知,智能机器人领域有一个“超级网红”——波士顿动力公司以及旗下Atlas、SpotMini等一众多足机器人。每当成果公布,波士顿动力必然成为AI圈内的焦点之一。
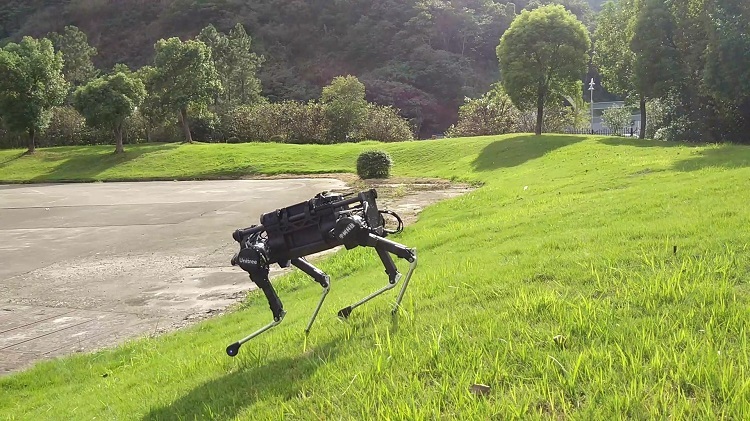
的确,在运动控制能力方面,波士顿动力的成果是令人惊艳的。不过,国内一只叫做“Laikago(莱卡狗)”的四足机器人也是不遑多让。

虽然很多条件尚不成熟,但他还是选择离职创业
“我从小喜欢科技,硕士期间机缘巧合搞四足机器人,当时发现并意识到,纯电机驱动的四足机器人,也能实现和波士顿动力机器人类似的运动性能,当时他们的机器人还全部使用液压动力。”宇树科技创始人兼CEO王兴兴表示。
在硕士读研期间,基于国外公开论文的基础,王兴兴就独立设计开发了“XDog”,可以说,这是现在Laikago的雏形。原本,这只是一项他在大学期间的研究项目,令人想不到的是,在其毕业之后不久,XDog的测试视频被国内外媒体多方报道了一下,一时间成为业内焦点。
彼时,王兴兴已经从学校毕业并进入大疆工作。不过,在自己的项目被多番报道之后,虽然很多条件尚不成熟,但王兴兴还是觉得机会难得。
于是,在大疆工作仅两个多月后,他便离职投入创业大军,在获得天使轮融资后创立了现在的“宇树科技”。

重构四足机器人“Laikago”,今年的任务是实现小批量量产
在创立公司之后,王兴兴从尺寸、体型、动力性能规划出发,按设计需求全新独立研发了电机、电动驱动及主控、整机机械结构以及全新重构的控制系统,打造了全新的四足机器人“Laikago”。
基于运动控制算法,Laikago在运动控制、平衡能力等方面取得了很好的成果。不过,众所周知,成本与能耗是多足机器人所共同面对的问题,宇树科技也不可避免。“目前还是相对有些贵,这是由成本、研发投入等方面决定的。后面量产跟上,市场反应还不错的话,产品的价格自然会下降些。”王兴兴称。
至于能耗问题,他表示,虽然多足式机器人的效率比不上轮式机器人,但是“充一次电、运行几小时”的情况在未来并不是大问题。

当前,宇树科技还没有对多足式机器人在实际生活中的应用进行尝试,用王兴兴的话来讲,这一步还是有些太早了。仅仅在稳定性方面,他表示还是存在不足之处,需要做很多工作。
不过,虽然Laikago还没开始进行实际生活中应用的尝试,但是已经有不少客户想要在宇树科技的机器人平台上做二次开发,打造实际应用等等。
与此同时,我们可以看到,在足式机器人的研究与商业化上,宇树科技之外,像优必选、钢铁侠科技等都有所涉及,并已经在商业化进程上有所成绩。对此,王兴兴表示,无论是技术方案还是产品本身,与他们之间并不存在直接的竞争关系,而他们更多的竞争压力是来自于国外。
去年10月份,宇树科技正式对外发布了自己的首款产品,即四足机器人Laikago。按照计划,在今年,他们将要实现Laikago的优化完善以及小批量的量产及发货。
除了担当实验对象和搬运载体,多足机器人还具备娱乐性
对于Laikago未来的商业化应用,王兴兴曾提到过两个方向,分别是将之作为一种“模型”出售给实验室,亦或是提供动力系统解决方案等。此外,在王兴兴看来,娱乐也是多足机器人的一个具备潜力的应用方向。
关于多足机器人的娱乐潜力,我们可以来做一个猜想。正如现在我们所见到的足式机器人,多足式机器人也可以在舞台、节目中进行表演,甚至是集群表演。
另外,除了常规娱乐之外,或许多足机器人也可以成为“对战工具”。就比如此前的巨型机器人大战一样,只不过对战的双方从巨型机器人换成了多足式机器人。
不过,在商业化真正普及之前,我们在多足机器人方面还需要面临多个问题。除了成本与能耗问题,王兴兴表示:“中小型的四足机器人毕竟还是个新兴硬件,在整机机械结构的可靠性、机器人运动算法和功能性的机器人算法等,都还很有待进一步开发完善。”
眼下,小型多足式机器人已经在市面上实现了商业化,且以娱乐和陪伴为主。相比之下,即使算法再精良、平衡能力再强悍,因为成本等问题,中大型多足式机器人在短时间以内也是不会进入消费级市场的,多以实验室、商场等B端场景为主。至于未来如何,还是得看成本、市场需求、技术进步速度以及竞争压力等方面的情况。