机器视觉成像系统主要由相机(CCD/CMOS)、镜头和光源组成,是视觉检测的基础,成像系统的设计目的就是获取合格的原始图像,并且一个好的成像系统要保证系统运行期间图像质量的稳定,稳定的图像抓取是视觉检测稳定性的基本保证。
机器视觉
工业相机对成像稳定性的影响
对视觉系统设计者来说,工业相机的选择主要考虑其传感器类型、分辨率和帧率,其中传感器分CCD与CMOS两种,CMOS图像传感器集成度高,各元件、电路之间距离很近,干扰比较严重,成像噪声高,CCD传感器相机相对于CMOS相机具有灵敏度高、噪声低和响应速度快的特点,在稳定性方面,CCD相机的抗冲击与震动性也较强,一般来说,CCD传感器相机在成像质量上和稳定性方面要优于CCD相机。
影响相机成像质量的另一重要因素就是相机的镜头,镜头除了需要根据具体工作状况选择合适的焦距、景深和光圈等参数外,一个影响系统检测精度的重要因素就是图像的几何畸变误差,它是光学透镜固有的透视失真,受到制作工艺的影响,无法消除,只能弥补,虽然现在许多工业相机通过各种方法弥补镜头畸变产生的误差,但在高精度的检测领域,几何畸变仍然会对检测精度产生影响。
光源对成像稳定性的影响
光源具有放大图像的特征与缺陷、削弱混乱及背景的作用,直接影响输入数据的质量,由于没有通用的照明设备,光源的设计一直是机器视觉系统的难点,通常不仅需要针对每个特定的应用实例来选择光源类型,还要根据具体环境对光源安装、光源的照射方式进行斟酌,以达到最佳效果。不同类型的光源稳定性存在差异,常见的可见光光源有LED光源、卤素灯、日光灯和钠光灯等,可见光最大的缺点是不能持续稳定的输出光能,如日光灯,在使用的第一个100小时内,光能会下降15%左右,随着使用时间的增加,光能输出持续下降。除可见光外,在高检测任务的场景下,也常采用X射线和超声波等不可见光作为光源,可以持续稳定的输出光能,但不利于检测系统的操作,且价格昂贵。光源的不均匀性也会对图像质量产生影响,不同方向的发光强度存在差别也会引起噪声。可见光中LED光源的稳定性和寿命相对于卤素灯、日光灯等要好,响应时间短,可自由选择颜色,运行成本也低,得到了广泛的应用。光源的照射方式可分为背向照明、前向照明、结构光照明和频闪照明,其设计要点是以突出图像特征为准则。
软件稳定性
检测软件稳定性对机器视觉的影响毋庸置疑,视觉系统最终会在计算机上利用软件采用有针对性的算法进行图像滤波,边缘检测和边缘提取等一系列图像处理,不同的图像处理和分析手段以及不同的检测方法与计算公式,都会带来不同的误差,算法优劣决定测量精度的高低。
环境因素影响
视觉系统工作的测量环境包括温度、光照、电源变化、灰尘、湿度以及电磁干扰等,好的环境是视觉系统正常运行的保障。外界光照会影响照射在被测物体上的总光强,增加图像数据输出的噪声,电源电压的变化也会导致光源不稳,产生随时间变化的噪声。温度变化也会对相机的性能产生影响,相机在出厂时都会标志正常工作的温度范围,过热或过冷都会影响相机的正常工作。电磁干扰是工业检测现场不可避免的干扰因素,它对工业相机电路、数据信号传输电路等弱电电路的影响尤为严重,合格的视觉产品会在出厂时经严格的抗干扰测试,极大的降低了外界电磁干扰对硬件电路的影响。
机械结构定位影响
除成像系统硬件外,相机与物体之间的相对位置关系也会对图像质量的稳定性产生影响,如相机或工件的机械支撑结构如果存在震动,会影响检测精度,且这也是一个难以排查的问题。在动态下检测工件,需要考虑运动模糊对图像精度的影响(模糊像素 = 物体运动速度*相机曝光时间)。 另外,CCD相机与被测零件之间在理性状况下应为相机镜头光轴垂直于零件所在平面,但实际使用中,由于安装误差或相机、工件制造误差等原因不能保证光轴与被测平面完全垂直,存在一定角度偏差,同样对测量精度产生影响。
影响机器视觉检测系统不稳定性因素分析
2018-04-23
1758
版权
版权声明:
本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《
阿里云开发者社区用户服务协议》和
《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写
侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
简介:

目录
相关文章
|
算法
数据挖掘
数据库
|
4月前
|
运维
算法
数据处理
|
5月前
|
监控
算法
安全
UWB定位技术源码:实现微米级精度的人员定位系统
UWB人员定位系统是一种基于超宽带技术的人员定位系统,它通过发送和接收超短脉冲信号,在测距方面可以达到微米级精度。这种系统通常需要具备高精度的定位能力,通常需要达到微米级别,这样可以在室内和室外的复杂环境中精确定位,为人员的个人安全提供更好地保障。
66
0
0

|
8月前
|
人工智能
运维
数据可视化
|
10月前
|
算法
计算机视觉
|
传感器
编解码
人工智能
2022最新!更面向工业场景:基于视觉方案不同挑战下的车道检测与跟踪(上)
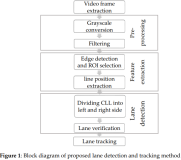
本文作者提出了一种鲁棒的车道检测和跟踪方法来检测车道线,该方法主要介绍了三个关键技术。首先,应用双边滤波器来平滑和保留边缘,引入了一个优化的强度阈值范围(OITR)来提高canny算子的性能,该算子检测低强度(有色、腐蚀或模糊)车道标记的边缘。第二,提出了一种稳健的车道验证技术,即基于角度和长度的几何约束(ALGC)算法,然后进行霍夫变换,以验证车道线的特征并防止不正确的车道线检测。最后,提出了一种新的车道线跟踪技术,即水平可调车道重新定位范围(HALRR)算法,该算法可以在左、右或两条车道标记在短时间内部分和完全不可见时跟踪车道位置。
219
0
0
|
编解码
人工智能
算法
2022最新!更面向工业场景:基于视觉方案不同挑战下的车道检测与跟踪(下)
本文作者提出了一种鲁棒的车道检测和跟踪方法来检测车道线,该方法主要介绍了三个关键技术。首先,应用双边滤波器来平滑和保留边缘,引入了一个优化的强度阈值范围(OITR)来提高canny算子的性能,该算子检测低强度(有色、腐蚀或模糊)车道标记的边缘。第二,提出了一种稳健的车道验证技术,即基于角度和长度的几何约束(ALGC)算法,然后进行霍夫变换,以验证车道线的特征并防止不正确的车道线检测。最后,提出了一种新的车道线跟踪技术,即水平可调车道重新定位范围(HALRR)算法,该算法可以在左、右或两条车道标记在短时间内部分和完全不可见时跟踪车道位置。
154
0
0

表面瑕疵检测系统正在迅速取代人工视觉检测
**表面瑕疵检测系统正在迅速取代人工视觉检测**
据了解到,在当前大批量工业自动生产过程中,用人工检查产品质量效率过低且精度不高;和其他一些人工视觉检测难以满足要求的场合,表面瑕疵检测系统正在迅速取代人工视觉检测。
1028
0
0
机器视觉技术在木材加工质量检测中的应用
1461
0
0
铸造模具缺陷检测中的机器视觉技术应用
2078
0
0