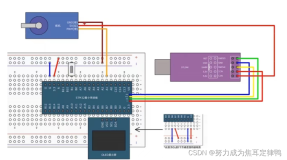
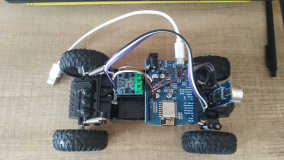
这几天了ARM9什么都不想做了,每天都想着这儿,买的板子实际上讲板子的内容很少的,都是些实际操作之类的,这个需要不断的联系才能熟练,板子配送的其余13张光盘都是讲的基于Linux的嵌入式,这个更需要时间去理解了,整好现在正在玩智能小车,准备弄个循迹,避障,超声波的车子,至于别的蓝牙模块的烧钱的就看情况了。下面主要是讲讲这个循迹模块的一些只是笔记了。。
材料:5x7cm洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K电阻3个、330电阻三个、红色3mmLED三个。
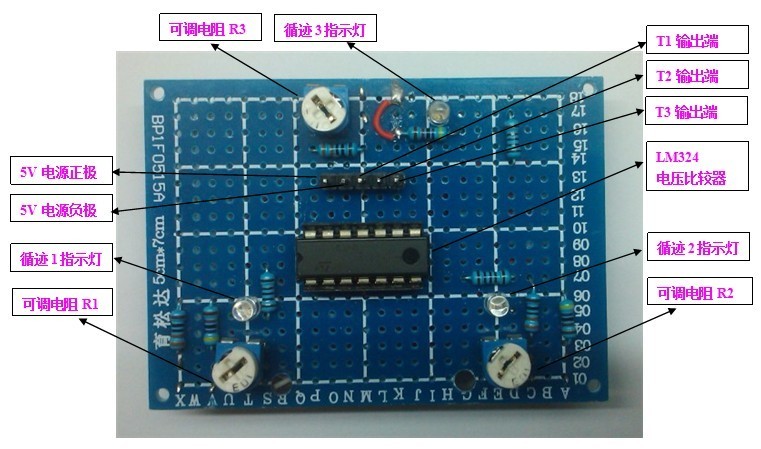
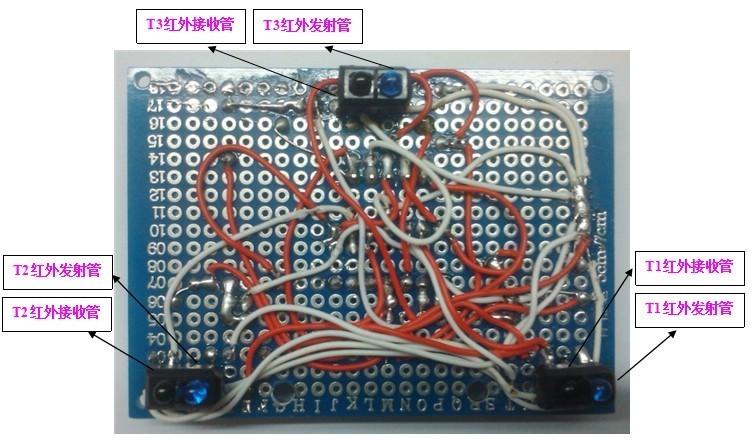
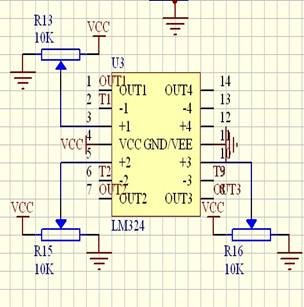
焊接好的板子就是这个样的 啦。主要i是LM324这块芯片,,说说LM324电压比较器工作原理:
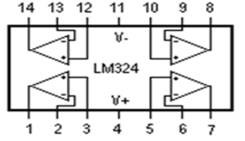
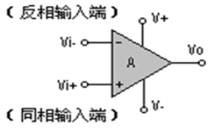
该芯片内部有四组比较器,原理就是反相输入端Vi—与同相输入端Vi+的电压进行比较,若Vi+大于Vi—则比较器的输出端OUT输出高电平+5V;若Vi+小于Vi—则比较器的输出端OUT输出低电平0V;
另外是红外对管,TCRT5000红外对管工作原理:
工作时由蓝色发射管发射红外线,红外线由遮挡物反射回来被接收管接收。接收反射光线后的接收管呈导通状态,与一电阻串联即可构成一个由发射管控制的分压电路,由此可实现对遮挡物反射光线强度的检测。我们经常利用这一特性去实现黑白颜色识别。
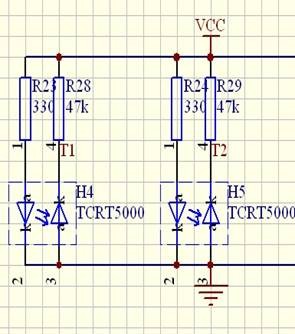
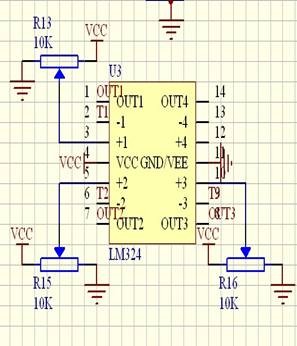
在小车行驶过程中发射管不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。如图12轨迹识别电路所示,发射管(1、2端)与阻值为330欧姆的电阻串联发射红外线。接收管(3、4)与阻值为47K欧姆的电阻串联。在没有接收到反射光线时接收管截止呈高阻态,TX输出高电平。当接收管接收到反射光线时,接收管被导通,并且电阻远小于47K,TX输出低电平。制作过程还在继续,,,