未来几年,计算机视觉处理、语言理解和运动决策将成为机器人行业关注的重点。
也不知从什么时候开始,行业内的人都喜欢在闲暇时去网上搜索以“人工智障”为关键词的视频片段集锦,让自己在忙碌的工作之余放松的笑一会。但在笑声的背后,我们却能很清晰的感受到,现在的机器人太过初级,不仅没有达到“智能”的程度,还特别的“智障”。
在视频集锦中,“机器人”们或是打翻东西,或是走到墙角之后一直撞墙,又或是直接“暴打”测试人员,仿如运动障碍者。
“除让机器人在视觉、语义理解等方面‘智能化’之外,我们还需要让它们拥有一个‘会运动的脑子’,这就是我们所说的‘运动脑’。”钢铁侠机器人创始人&CEO张锐说。

钢铁侠机器人创始人&CEO张锐
高大上的团队,理所应当应该挑战高难度项目
通常情况下,镁客君在专访的开始,都会先了解一下CEO们在创业之前的工作或学习经历,而张锐的工作经历则尤为“高大上”。
创立钢铁侠之前,张锐曾经从事过军用无人机数据链系统、复杂系统仿真建模等工作,积累了大量的如驱动、传感、控制等底层算法的研发经验。此外,张锐还曾经参与过某军用卫星大型项目,负责卫星控制系统的设计与研发。
“这些工作经历,不仅让我积累了大量的底层技术研发经验,还让我认识到了军工严谨的管理方法和管理流程。而其后的卫星研发工作,更让我在多部门协同合作等方面的能力有了极大提升。”
凭借着较强的技术研发实力,2015年9月,张锐创立了钢铁侠机器人,专注于双足大仿人机器人的研发与推广。

“在国内,从事双足大仿人机器人研发工作的人特别的少。因为这类机器人不仅涉及到硬件开发,还需要我们在算法、运动控制、计算机视觉和语义理解等多个方面深耕,难度特别的大,能做好的人不多。而我个人是技术出身,喜欢有挑战性的工作,就决定去啃啃这块‘硬骨头’。”
张锐介绍说,目前,钢铁侠团队约有20余人,核心骨干来自中科院或航天院所,均参与过嫦娥卫星、导弹、军用无人机等的军工项目研发,极具技术实力。此外,由于团队较为年轻,乐于挑战高难度项目,所以他们的团队协作性很强。
“从成立之日起至今年8月,不到两年的时间,我们机器人已开发至第三代了。这样的开发速度,在全球范围内都是数一数二的。”
近日,钢铁侠还获得了由中国人工智能机器人产业联盟颁发的“2017年度中国商用机器人最佳品牌”荣誉。
双足大仿人机器人与“运动脑”的结合,将成为未来机器人的标配
“钢铁侠的仿人大足机器人不仅是一个硬件产品,还同时为开发者们提供了一个软件开发平台。”
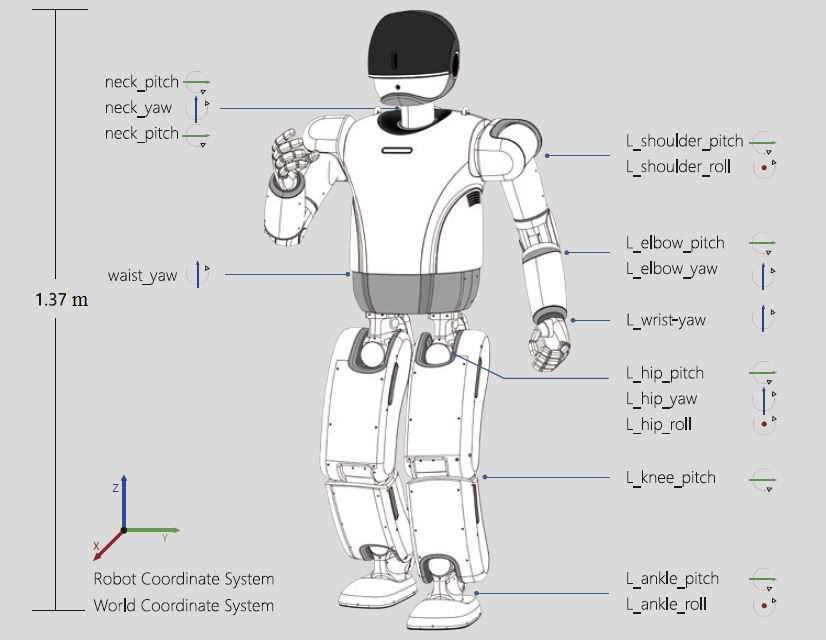
据了解,钢铁侠机器人总重约50KG,外观尺寸为1370x530x240mm,头部、腰部、手臂、手、腿部等的可以主动控制的自由度共计36个,与“真人”极为相似。除此之外,机器人搭载基于Gazebo的仿真平台和基于Ubuntu的ROS系统,在硬件接口和开源等方面极为便捷。
“在我们看来,如果人是可以广泛生存于这个世界的,那么我们的仿人机器人就应该能被广泛应用于各个领域。而当前的大多机器人都还只能机械的执行一些简单的任务,不能通过‘自己的思考’去做一些事情。所以,基于机器人硬件本体,钢铁侠为机器人嵌入了‘运动脑’系统,并为其加入不同的算法,赋予其不同的功能。”
举个例子,你跟机器人说:去隔壁倒杯水给我。这个时候,如果机器人要完美的执行这项任务,它就需要先了解什么是“隔壁”、什么是“水”。然后,机器人需要思考怎么去到“隔壁”、在什么地方接水、用什么接水、接完水之后怎么回来、回来之后要怎么把水交给你。这些,都不是只会简单运动的机器人能做的,它需要先有一个与人的小脑一样,可以控制运动且会思考的“运动脑”。
“除仿人机器人本身之外,我们还能够通过这些技术输出其他产品,如机械臂或可人机协作、助力行走类的机器人,它具备一定的产品衍生性能。”
虽仿人机器人应用领域广泛,但想要做好其实很难
张锐告诉镁客君,目前,钢铁侠机器人主要应用于三大领域:
一、作为公共研究平台,为高校、研究机构等提供软件开发服务。据了解,2016年,中国工程院院士、中国人工智能学会理事长李德毅就在钢铁侠设立了院士专家工作站;
二、作为展示对象,在科技馆、展览等地方进行展示或参加一些商业性活动和主持电视节目等;
三、作为硬件产品,结合具体行业需求,应用于航天、核辐射实验等领域。
“2018年,我们的主要工作还将集中于这三个方面。看似应用领域很少,但要做的事情非常的多。因为不同用户的需求和应用场景都是不一样的,而我们提供的是针对性的服务。”
举个例子,在和电视台合作时,不同的节目就有着不同的风格,需要机器人扮演的角色、互动形式也就不同。也因此,想要真正服务好以上三大领域,钢铁侠要做的开发工作还有很多。
总结
机器人只有在有了“脑子”之后才能被称为智能产品。从今年行业发展的整体情况来看,计算机视觉、语义理解等技术都非常快速的大范围应用于机器人产品上,但在机器人的运动控制技术方面,依旧有所欠缺。
“仿人机器人不仅要外形像人,更要有人的‘智慧’。因此,未来几年,计算机视觉处理、语言理解和运动决策将成为机器人行业关注的重点。”

