一 、 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解
计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表
示各个坐标系下的转换,首先在图像坐标系下与相机坐标系的关系
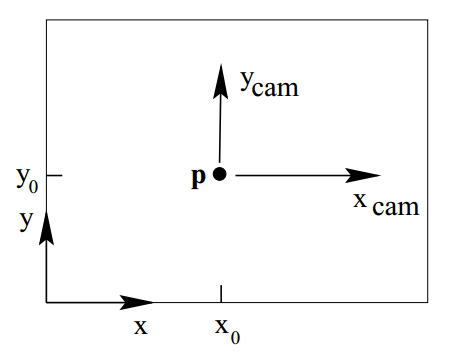
可得出 Xcam=x/dx+x0, Ycam=y/dy+y0 表示为矩阵形式
Xcam 1/dx 0 x0 x
Ycam = 0 1/dy y0 * y
1 0 0 1 1
相机坐标系与图像坐标系的关系是
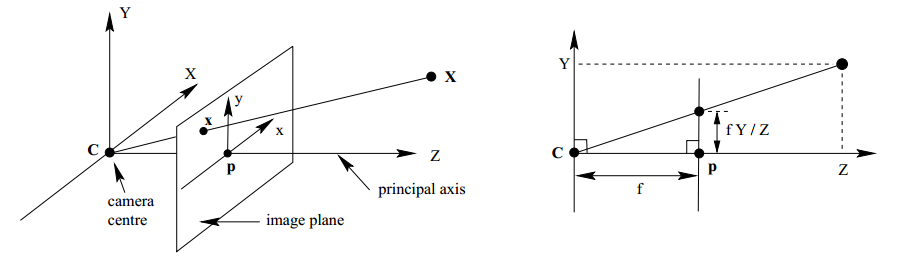
既有![]() 可以写成
可以写成 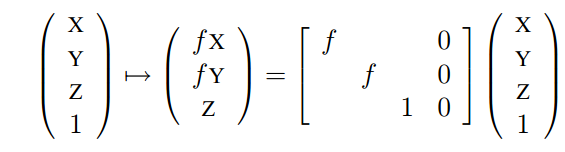
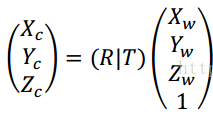
我们知道相机坐标系与世界坐标系的关系是
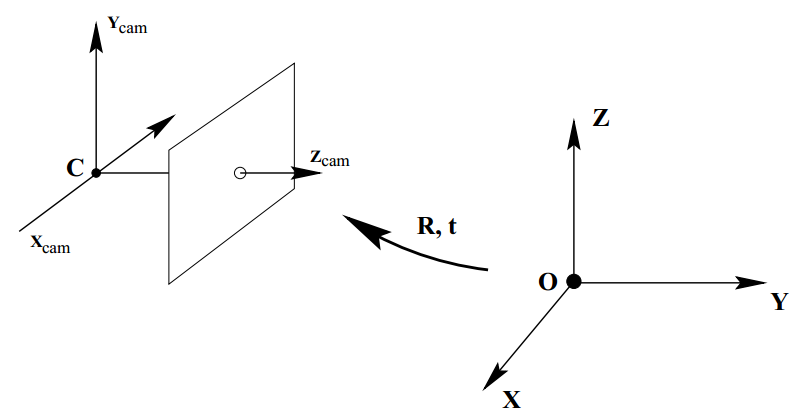 表达成矩阵表示为
表达成矩阵表示为
 可以推导出
可以推导出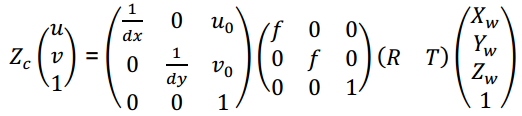
(这里面的Xc ,Yc,Zc 也就是上面的X Y Z )其中
K= 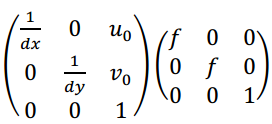 就为相机的内参 R T 为相机的外参(好难编辑)
就为相机的内参 R T 为相机的外参(好难编辑)
接下来就是说明一下使用MATLAB Opencv ,以及ROS环境下的Opencv进行相机校准
相机的标定主要有两种方法 :摄像头标定方法和摄像头自标定方法,典型的有:(1)Tsai(传统的标定方法) (2)张正友(介于传统与自标定方法之间)张正友标定法由于很简单
所以得到广泛 的应用,张正友标定法的步骤:
1、打印一张模板并贴在一个平面上;
2、从不同角度拍摄若干张模板图像;
3、检测出图像中的特征点;
4、求出摄像机的外参数(单应性矩阵)和内参数(最大似然估计) ;
5、求出畸变系数;
6、优化求精。
二、对于在matlab中进行相机标定是一件非常简单的事,因为在matlab官方网站,以及matlab中文论坛上都是有教程的,只需要找到标定模板就可以了,
matlab中文论坛的学习网址 http://www.ilovematlab.cn/thread-267670-1-1.html
详细相机标定过程请参考 http://www.mathworks.com/help/vi ... ator.html#btxr8c_-2
MATLAB相机标定教学视频 http://www.mathworks.com/videos/ ... h-matlab-81233.html
2.1 首先我们得准备软件matlab,安装matlab就按照网上的教程既可以安装成功了,不过安装过程可能遇到一些软件破解的一些问题,如果安装不上,
那就果断的换安装的软件版本, 其次就是准备标定魔板,我是直 接用A3的纸打印了标准的棋盘方格,自己百度一下标定棋盘网上有很多图纸可供下载,
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=view&target=check-108.pdf
我使用的就是check-108,其中108代表的是每个小方格的边长为108mm,使用A3的纸张打印,后来测量一下每个黑白方格的边长为35mm,
2.2 材料和软件都准备好了,我们在准备摄像头,我们有四个选择:(1)手机拍照 我们就标定手机的摄像头,(2)笔记本自带的摄像头,(3)使用带USB的的摄像头(4)网上提供的模板
2.2.1 手机摄像头标定,最好的方法是将手机固定,然后移动标定模板,改变模板的远近位置,以及翻转角度等等,如下图
这里面是我把标定模板给固定,改变手机的位置,这就导致拍出来的照骗有些事不能用的(可以试试),就会明白为什么会不能进行标定了,
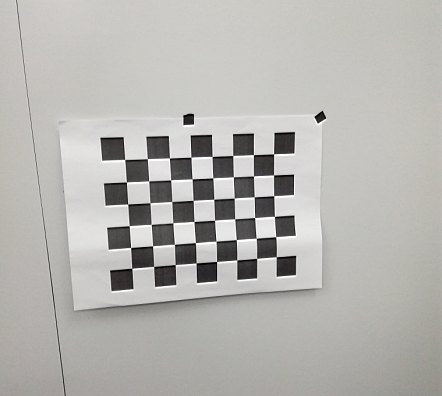
这只是展示其中四张照片,当然拍下来的至少要20张不一样的照片,现在开始使用MATLAB进行标定了,
2.2.2当我们想标定笔记本的摄像头或者我自己外界一个摄像头的时候,就需要使用一个软件去获取摄像头的照骗,使用 Ecap软件就可以打开摄像头,并且捕捉照骗
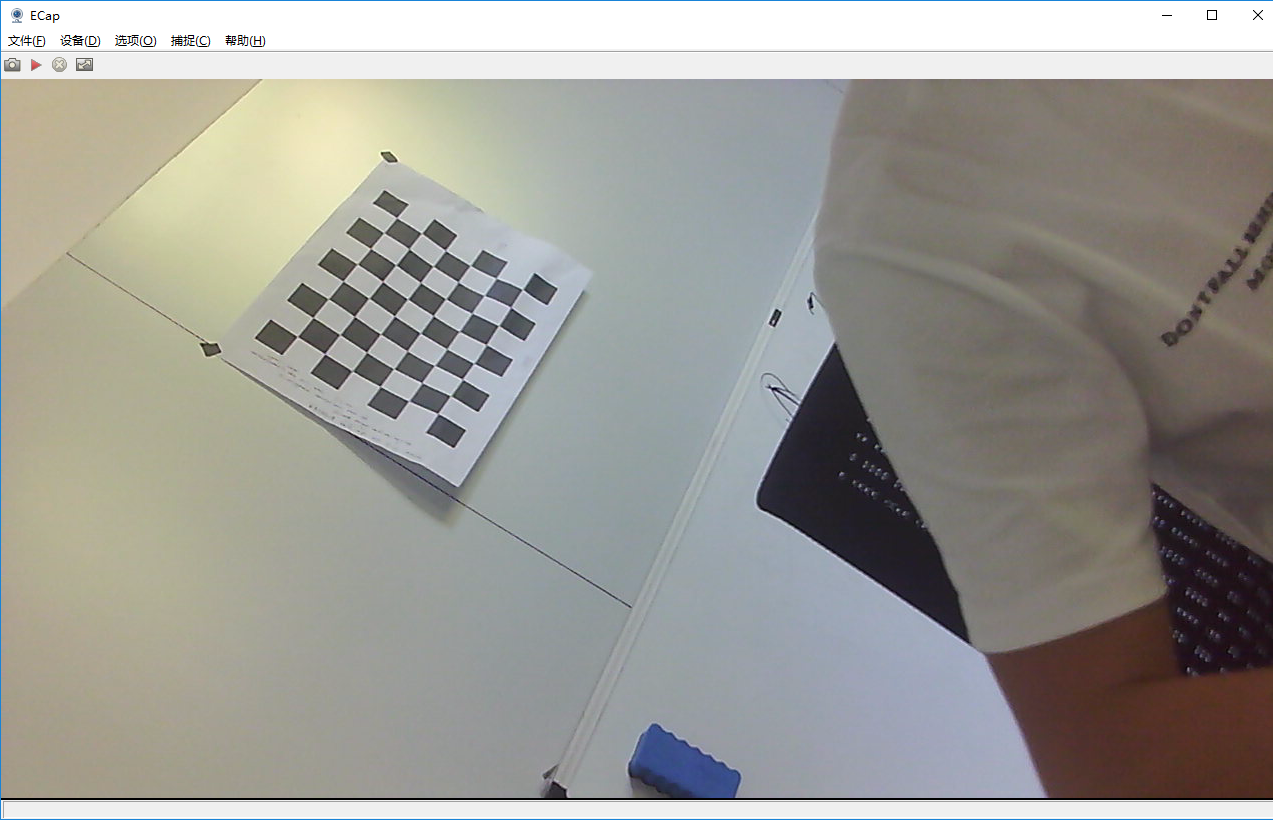
可以捕获很多不同角度的关于标定模板的图片,至少需要20张,紧接着打开matlab,在命令行输入
>> cameraCalibrator 出现:
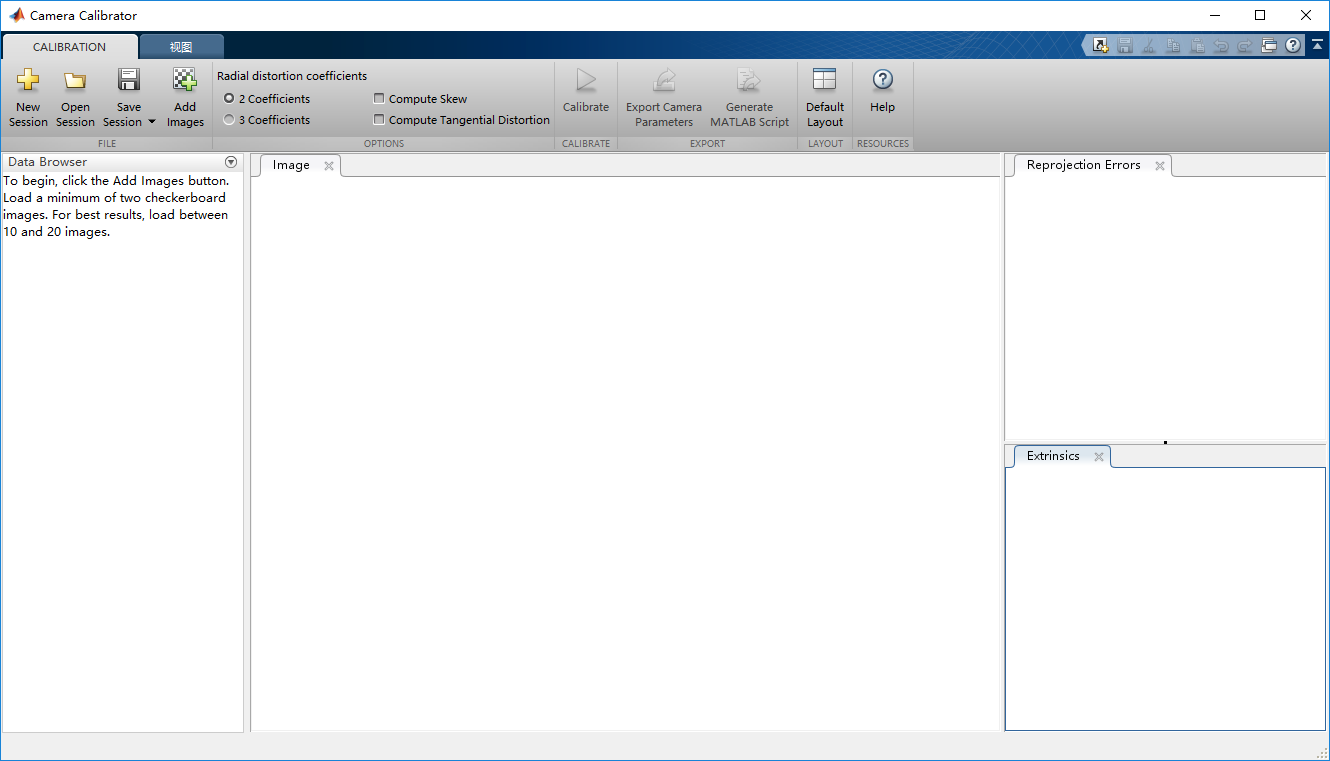
之后可以添加“add images”,然后选择我的模板的方格大小,默认是25mm 改为与实际模板一致的边长是35mm
也可以直接添加网上所提供的标定模板,

此标定模板为6*4 108mm 添加完选择“”calibrate“”有
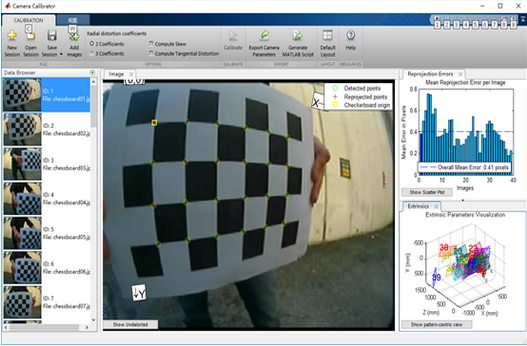
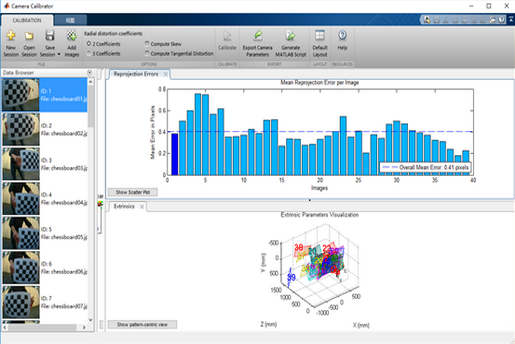
右边出现一下统计图,左下角就是每个图片相对摄像头的远近和角度,点击保存calibration.mat文件,点击“Export camera parameters”出现标定的结果
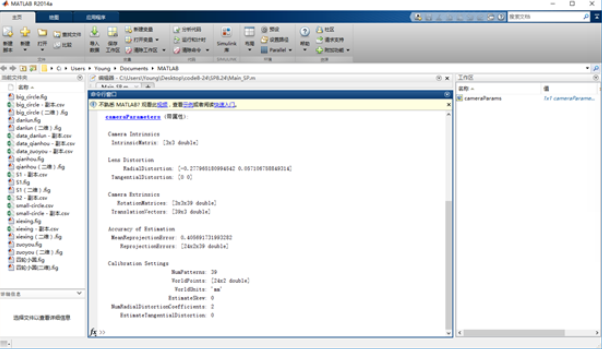
到此MATLAB的相机标定就完成了
(虽然我写的很幸苦,但是我也只是想记录下我的实验过程,中间也遇到很多问题,这都是解决后的结果本来是1,2,3放在一起的
但是因为篇幅太长,只好将其分为三段,中间也丢失过好几次,然后又重新写,大神们看见就当是在看笑话,一笑了之即可,
我知道这其中没有什么创新可言,真实惭愧,谢谢)
版权所有,转载请注明出处如果您觉得看完有所收获,欢迎扫一扫,可以资助一分,几分money,不在乎多少(我也是跟网上的大神们学的),不想挣钱娶媳妇的程序员不是好程序员,谢谢


