图像处理_滤波器
(1)图像的平滑处理
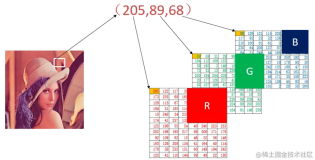
图像的平滑也称模糊,平滑处理需要一个滤波器,最常用的滤波器就是线性滤波器,线性滤波器的输出像素值是g(x,y),是输入像素值是 f(x,y)的加权和: 
h( k,l )称为核,它仅仅是一个加权系数,那么滤波器有很多种,最常用的滤波器介绍如下:
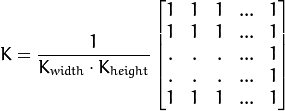
归一化块滤波器:是比较简单的滤波器,输出的像素值是核窗口内像素值的均值(所有像素的加权系数相等),核如下:
高斯滤波器:最有用的滤波器。高斯滤波器是将输入数组的每一个像素点与高斯内核卷积,将卷积当作输出像素值,比如一维高斯函数的:
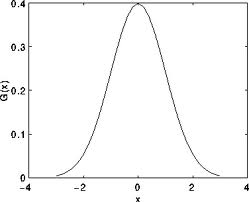
可以发现中间像素的加权系数最大,周边的像素的加权系数随着它们远离中间像素的距离的增大而减小,二维高斯函数的表达式是

其中u为均值,峰值对应的位置,o是代表标准差,变量x,y各有一个均值,也各有一个标准差
中值滤波器:将图像的每一个像素用领域像素的中值替代(以当前像素为中心的正方形区域)
双边滤波器:类似与高斯滤波器,双边滤波器也给每一个领域像素分配一个加权系数,这个加权系数包含两个部分,第一部分加权方式与高斯滤波一样(是有几何空间距离决定滤波器的系数),第二部分的权重则取决于该领域像素与当前像素的灰度差值,是一种可以包边去噪的滤波器
双边滤波器中输出滤波器的值依赖于邻域像素值的加权组合
权重系数w(i,j,k,l)取决于定义域核

和值域核

的卷积

源码与结果
#include <iostream>
#include <vector>
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/features2d/features2d.hpp"
using namespace std;
using namespace cv;
/// 全局变量
int DELAY_CAPTION = 1500;
int DELAY_BLUR = 100;
int MAX_KERNEL_LENGTH = 31; //最大的核长度
Mat src; Mat dst;
char window_name[] = "Smoothing Demo";
/// Function headers函数声明
int display_caption( const char* caption );
int display_dst( int delay );
/**
* function main
*/
int main( void )
{
namedWindow( window_name, WINDOW_AUTOSIZE );
///载入原图想
src = imread( "/home/salm/myopencv/images/cat.jpg", 1 );
if( display_caption( "Original Image" ) != 0 ) { return 0; }
dst = src.clone();
if( display_dst( DELAY_CAPTION ) != 0 ) { return 0; }
/// Applying Homogeneous blur 使用均值平滑
/*blur归一化块滤波
src: 输入图像
dst: 输出图像
Size( w,h ): 定义内核大小( w 像素宽度, h 像素高度)
Point(-1, -1): 指定锚点位置(被平滑点), 如果是负值,取核的中心为锚点。
*/
if( display_caption( "Homogeneous Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ blur( src, dst, Size( i, i ), Point(-1,-1) );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
/// Applying Gaussian blur 使用高斯平滑
if( display_caption( "Gaussian Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ GaussianBlur( src, dst, Size( i, i ), 0, 0 ); //Size(w, h): 定义内核的大小(需要考虑的邻域范围)。 w 和 h 必须是正奇数,否则将使用 \sigma_{x} 和 \sigma_{y} 参数来计算内核大小
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
/// Applying Median blur 中值滤波
if( display_caption( "Median Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ medianBlur ( src, dst, i ); //i: 内核大小 (只需一个值,因为我们使用正方形窗口),必须为奇数
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
/// Applying Bilateral Filter 双边滤波
/*
bilateral执行双边滤波操作
src: 输入图像
dst: 输出图像
d: 像素的邻域直径
sigma_{Color}: 颜色空间的标准方差
sigma_{Space}: 坐标空间的标准方差(像素单位)
*/
if( display_caption( "Bilateral Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ bilateralFilter ( src, dst, i, i*2, i/2 );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
/// Wait until user press a key
display_caption( "End: Press a key!" );
waitKey(0);
return 0;
}
/**
* @function display_caption
*/
int display_caption( const char* caption )
{
dst = Mat::zeros( src.size(), src.type() );
putText( dst, caption,
Point( src.cols/4, src.rows/2),
FONT_HERSHEY_COMPLEX, 1, Scalar(255, 255, 255) );
imshow( window_name, dst );
int c = waitKey( DELAY_CAPTION );
if( c >= 0 ) { return -1; }
return 0;
}
/**
* @function display_dst
*/
int display_dst( int delay )
{
imshow( window_name, dst );
int c = waitKey ( delay );
if( c >= 0 ) { return -1; }
return 0;
}
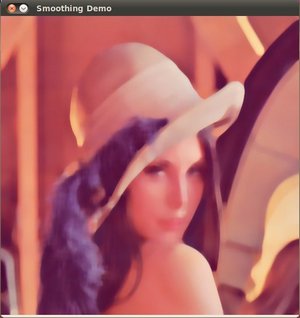
结果为
腐蚀与膨胀(Eroding and Dilating)
形态学操作是基于形状的一系列图像处理操作,通过结构元素作用于输入图像来产生输出图像,最基本的形态学操作有两种:erision 与 dilation 它们的应用广泛,主要有消除噪声,分割独立的图像元素,连接相邻的元素,寻找图像中明显的极大值或极小值区域
通俗的说:膨胀算法是图像扩大一圈,腐蚀算法是图像缩小一圈,腐蚀是删除对象边界的某些元素,膨胀是给图像的边界添加某些元素,算法从图像的角度来看,二值图像的腐蚀与膨胀就是将一个小型的二值图像(比如一般为结构元素 一般为3*3的)在图像上进行逐点的运动并比较,根据比较的结果做出相应的处理。
膨胀算法:用3*3的结构元素,扫描二值图像的每一个像素,用结构元素与其覆盖的二值图像做“与”运行,如果都为“0”结构图像的该元素就为0 否则就为1 结果会使得二值图像扩大一圈
腐蚀算法:用3*3的结果元素,扫描二值图像的每一个像素,用结构元素与其覆盖的二值图像做“与”运算,结构都为1 结构图像的该元素就为1 否则就为0 结果使二值图像减小一圈
OpenCV里面的腐蚀膨胀都是针对 白色 目标区域的。说膨胀使图像 变大一圈, 那是指 图像中的 白色目标区域 扩大了一圈
源码
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/// Global variables 全局变量
Mat src, erosion_dst, dilation_dst;
int erosion_elem = 0;
int erosion_size = 0;
int dilation_elem = 0;
int dilation_size = 0;
int const max_elem = 2;
int const max_kernel_size = 21;
//函数申明
void Erosion( int, void* );
void Dilation( int, void* );
int main( int, char** argv )
{
/// Load an image
src = imread( argv[1] );
if( !src.data )
{ return -1; }
/// Create windows
namedWindow( "Erosion Demo", WINDOW_AUTOSIZE );
namedWindow( "Dilation Demo", WINDOW_AUTOSIZE );
moveWindow( "Dilation Demo", src.cols, 0 );
/// Create Erosion Trackbar
createTrackbar( "Element:\n 0: Rect \n 1: Cross \n 2: Ellipse", "Erosion Demo",
&erosion_elem, max_elem,
Erosion );
createTrackbar( "Kernel size:\n 2n +1", "Erosion Demo",
&erosion_size, max_kernel_size,
Erosion );
/// Create Dilation Trackbar
createTrackbar( "Element:\n 0: Rect \n 1: Cross \n 2: Ellipse", "Dilation Demo",
&dilation_elem, max_elem,
Dilation );
createTrackbar( "Kernel size:\n 2n +1", "Dilation Demo",
&dilation_size, max_kernel_size,
Dilation );
/// Default start
Erosion( 0, 0 );
Dilation( 0, 0 );
waitKey(0);
return 0;
}
/*
内核选择三种形状之一:
矩形: MORPH_RECT
交叉形: MORPH_CROSS
椭圆形: MORPH_ELLIPSE
*/
void Erosion( int, void* )
{
int erosion_type = 0;
if( erosion_elem == 0 ){ erosion_type = MORPH_RECT; }
else if( erosion_elem == 1 ){ erosion_type = MORPH_CROSS; }
else if( erosion_elem == 2) { erosion_type = MORPH_ELLIPSE; }
Mat element = getStructuringElement( erosion_type,
Size( 2*erosion_size + 1, 2*erosion_size+1 ),
Point( erosion_size, erosion_size ) );
/// Apply the erosion operation
erode( src, erosion_dst, element );
imshow( "Erosion Demo", erosion_dst );
}
void Dilation( int, void* )
{
int dilation_type = 0;
if( dilation_elem == 0 ){ dilation_type = MORPH_RECT; }
else if( dilation_elem == 1 ){ dilation_type = MORPH_CROSS; }
else if( dilation_elem == 2) { dilation_type = MORPH_ELLIPSE; }
Mat element = getStructuringElement( dilation_type,
Size( 2*dilation_size + 1, 2*dilation_size+1 ),
Point( dilation_size, dilation_size ) );
/// Apply the dilation operation
dilate( src, dilation_dst, element );
imshow( "Dilation Demo", dilation_dst );
}
更改Trackbars的位置就会产生不一样的输出图像
更多的形态学变换
开运算(opening):是通过对图像先腐蚀后膨胀实现 , 能够排除小团块物体(假设物体较背景明亮)
![]()
闭运算:(closing):使用过先膨胀后腐蚀实现的, 能够排除小型黑洞(黑色区域)
![]()
形态梯度(morphological Gradient):膨胀图与腐蚀图之差 , 能够保留物体的边缘轮廓![]()
顶帽(Top Hat):原图像与开运算结果图之差 ![]()
黑帽(black Hat):闭运算结果图与原图像之差![]()
源码
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/// Global variables
Mat src, dst;
int morph_elem = 0;
int morph_size = 0;
int morph_operator = 0;
int const max_operator = 4;
int const max_elem = 2;
int const max_kernel_size = 21;
const char* window_name = "Morphology Transformations Demo";
/** Function Headers */
void Morphology_Operations( int, void* );
int main( int, char** argv )
{
/// 载入图像
src = imread( argv[1] );
if( !src.data )
{ return -1; }
/// Create window
namedWindow( window_name, WINDOW_AUTOSIZE );
/// Create Trackbar to select Morphology operation
createTrackbar("Operator:\n 0: Opening - 1: Closing \n 2: Gradient - 3: Top Hat \n 4: Black Hat", window_name, &morph_operator, max_operator, Morphology_Operations );
/// Create Trackbar to select kernel type
createTrackbar( "Element:\n 0: Rect - 1: Cross - 2: Ellipse", window_name,
&morph_elem, max_elem,
Morphology_Operations );
/// Create Trackbar to choose kernel size
createTrackbar( "Kernel size:\n 2n +1", window_name,
&morph_size, max_kernel_size,
Morphology_Operations );
/// Default start
Morphology_Operations( 0, 0 );
waitKey(0);
return 0;
}
/**
* @function Morphology_Operations
*/
void Morphology_Operations( int, void* )
{
// Since MORPH_X : 2,3,4,5 and 6
int operation = morph_operator + 2;
Mat element = getStructuringElement( morph_elem, Size( 2*morph_size + 1, 2*morph_size+1 ), Point( morph_size, morph_size ) );
/// Apply the specified morphology operation
morphologyEx( src, dst, operation, element );
imshow( window_name, dst );
}