热门
让你的文档从静态展示到一键部署可操作验证
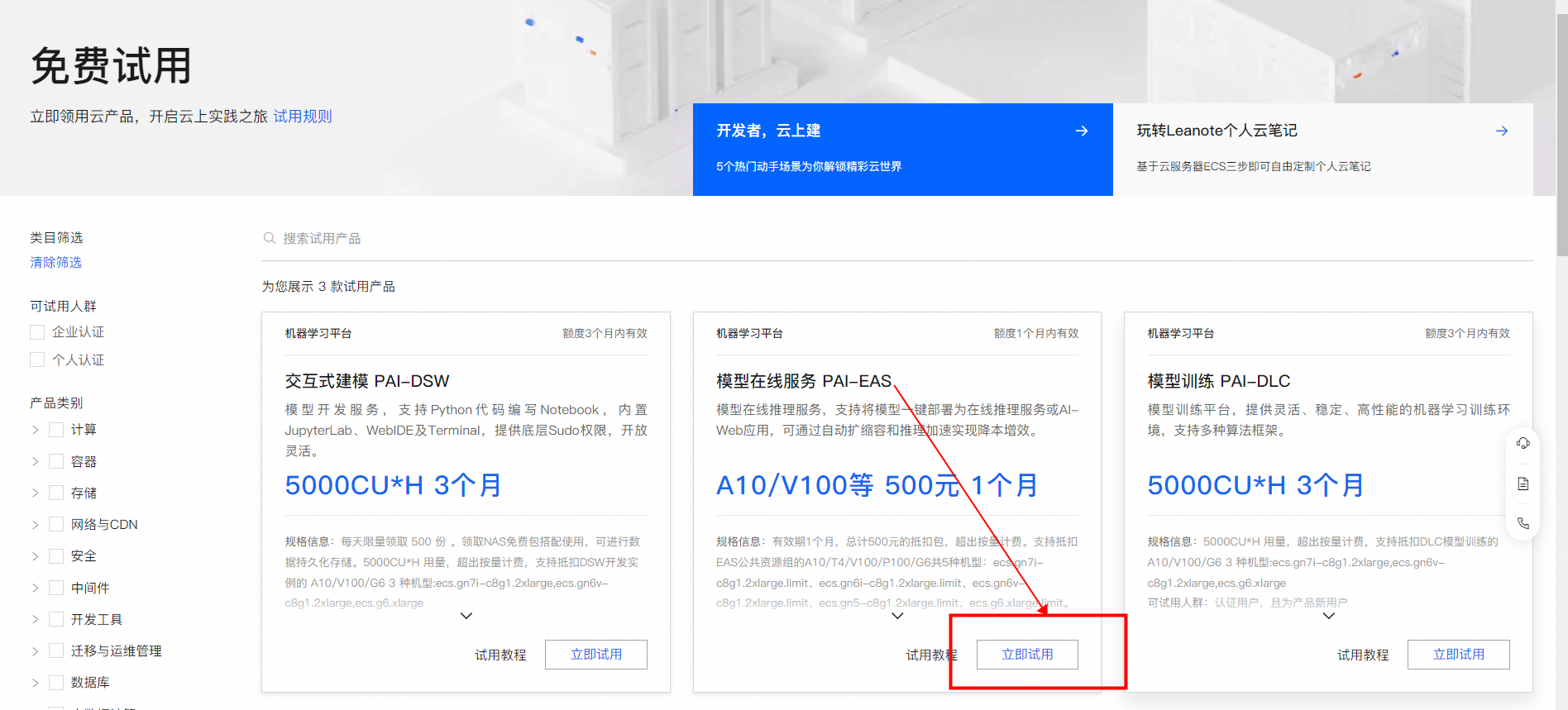
一键生成视频!用 PAI-EAS 部署 AI 视频生成模型 SVD 工作流
flask各种版本的项目,终端命令运行方式的实现
C# 将 Word 转文本存储到数据库并进行管理
使用TensorFlow实现Python简版神经网络模型
Pygame AttributeError no attribute ‘display‘问题及其解决方法
安卓群控代理ip问题怎么解决
【Flink】Flink的并行度了解吗?Flink的并行度设置是怎样的?
【Flink】怎么提交的实时任务,有多少Job Manager?
自己搭建代理IP池有哪些好处呢?
多ip多进程代理的实现方法
如何在代理的IP被封后立刻换下一个IP继续任务
Python基础之简单的小程序和小脚本
探索 Nacos反序列化漏洞CNVD-2023-45001
使用代理ip后访问网站仍然被拒该怎么办
如何配置Apache的反向代理
Python自然语言处理面试:NLTK、SpaCy与Hugging Face库详解
使用EEPROM断电保存数据
Python深度学习面试:CNN、RNN与Transformer详解
服务器反向代理的作用与实现
TensorFlow与PyTorch在Python面试中的对比与应用
Alibaba Cloud Linux基础入门(1)——配置zabbix
群控软件代理,群控服务器配置要求
深度解析Nginx正向代理的原理与实现
【微服务系列笔记】Seata
如何解决访问速度受限问题
Python机器学习面试:Scikit-learn基础与实践
【Flink】Flink集群有哪些角色?各自有什么作用?
Matplotlib与Seaborn在Python面试中的可视化题目
Pandas在Python面试中的应用与实战演练
电子好书发您分享《代码管理实践10讲 代码管理实践10讲》
电子好书发您分享《PolarDB分布式版架构介绍 PolarDB分布式版架构介绍》
电子好书发您分享《从零开始玩转AIGC 从零开始玩转AIGC》
Python数据分析面试:NumPy基础与应用
如何处理代理的404错误
设置ip代理无法联网怎么办
Python与NoSQL数据库(MongoDB、Redis等)面试问答
如何选择合适的IP代理
CCProxy代理服务器地址的设置步骤
Python与MySQL数据库交互:面试实战
Nginx正向代理域名的配置
反向代理服务器如何提升信息安全
使用PHP实现动态代理IP的功能
如何解决无法联网的IP代理问题
动态代理IP的并发处理技巧
Java动态转发代理IP的实现方法
全局代理与自动代理主要差异与选择
详解正向代理和反向代理的不同用途
git怎么设置http代理服务器
群控代理IP搭建教程