(3)上两篇介绍了关于欧几里德分割,条件分割,最小分割法等等还有之前就有用RANSAC法的分割方法,这一篇是关于区域生成的分割法,
区 域生长的基本 思想是: 将具有相似性的像素集合起来构成区域。首先对每个需要分割的区域找出一个种子像素作为生长的起点,然后将种子像素周围邻域中与种子有相同或相似性质的像素 (根据事先确定的生长或相似准则来确定)合并到种子像素所在的区域中。而新的像素继续作为种子向四周生长,直到再没有满足条件的像素可以包括进来,一个区 域就生长而成了。
区域生长算法直观感觉上和欧几里德算法相差不大,都是从一个点出发,最终占领整个被分割区域,欧几里德算法是通过距离远近,对于普通点云的区域生长,其可由法线、曲率估计算法获得其法线和曲率值。通过法线和曲率来判断某点是否属于该类。
算法的主要思想是:首先依据点的曲率值对点进行排序,之所以排序是因为,区域生长算法是从曲率最小的点开始生长的,这个点就是初始种子点,初始种子点所在的区域即为最平滑的区域,从最平滑的区域开始生长可减少分割片段的总数,提高效率,设置一空的种子点序列和空的聚类区域,选好初始种子后,将其加入到种子点序列中,并搜索邻域点,对每一个邻域点,比较邻域点的法线与当前种子点的法线之间的夹角,小于平滑阀值的将当前点加入到当前区域,然后检测每一个邻域点的曲率值,小于曲率阀值的加入到种子点序列中,删除当前的种子点,循环执行以上步骤,直到种子序列为空,
其算法可以总结为:
- 种子周围的临近点和种子点云相比较
- 法线的方向是否足够相近
- 曲率是否足够小
- 如果满足1,2则该点可用做种子点
- 如果只满足1,则归类而不做种
- 从某个种子出发,其“子种子”不再出现则一类聚集完成
- 类的规模既不能太大也不能太小
显然,上述算法是针对小曲率变化面设计的。尤其适合对连续阶梯平面进行分割:比如SLAM算法所获得的建筑走廊。
那么就看一下代码的效果
#include <iostream> #include <vector> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/search/search.h> #include <pcl/search/kdtree.h> #include <pcl/features/normal_3d.h> #include <pcl/visualization/cloud_viewer.h> #include <pcl/filters/passthrough.h> #include <pcl/segmentation/region_growing.h> int main (int argc, char** argv) { //点云的类型 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); //打开点云 if ( pcl::io::loadPCDFile <pcl::PointXYZ> ("region_growing_tutorial.pcd", *cloud) == -1) { std::cout << "Cloud reading failed." << std::endl; return (-1); } //设置搜索的方式或者说是结构 pcl::search::Search<pcl::PointXYZ>::Ptr tree = boost::shared_ptr<pcl::search::Search<pcl::PointXYZ> > (new pcl::search::KdTree<pcl::PointXYZ>); //求法线 pcl::PointCloud <pcl::Normal>::Ptr normals (new pcl::PointCloud <pcl::Normal>); pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimator; normal_estimator.setSearchMethod (tree); normal_estimator.setInputCloud (cloud); normal_estimator.setKSearch (50); normal_estimator.compute (*normals); //直通滤波在Z轴的0到1米之间 pcl::IndicesPtr indices (new std::vector <int>); pcl::PassThrough<pcl::PointXYZ> pass; pass.setInputCloud (cloud); pass.setFilterFieldName ("z"); pass.setFilterLimits (0.0, 1.0); pass.filter (*indices); //聚类对象<点,法线> pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> reg; reg.setMinClusterSize (50); //最小的聚类的点数 reg.setMaxClusterSize (1000000); //最大的 reg.setSearchMethod (tree); //搜索方式 reg.setNumberOfNeighbours (30); //设置搜索的邻域点的个数 reg.setInputCloud (cloud); //输入点 //reg.setIndices (indices); reg.setInputNormals (normals); //输入的法线 reg.setSmoothnessThreshold (3.0 / 180.0 * M_PI); //设置平滑度 reg.setCurvatureThreshold (1.0); //设置曲率的阀值 std::vector <pcl::PointIndices> clusters; reg.extract (clusters); std::cout << "Number of clusters is equal to " << clusters.size () << std::endl; std::cout << "First cluster has " << clusters[0].indices.size () << " points." << endl; std::cout << "These are the indices of the points of the initial" << std::endl << "cloud that belong to the first cluster:" << std::endl; int counter = 0; while (counter < clusters[0].indices.size ()) { std::cout << clusters[0].indices[counter] << ", "; counter++; if (counter % 10 == 0) std::cout << std::endl; } std::cout << std::endl; //可视化聚类的结果 pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud (); pcl::visualization::CloudViewer viewer ("Cluster viewer"); viewer.showCloud(colored_cloud); while (!viewer.wasStopped ()) { } return (0); }
看一下结果

原始点云

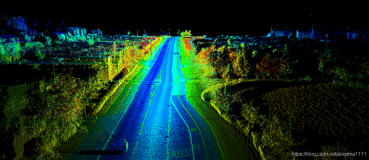
区域生成后的点云
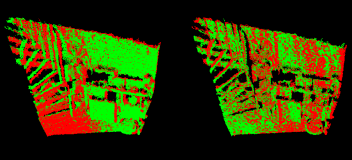
(4)基于颜色的区域生长分割法
除了普通点云之外,还有一种特殊的点云,成为RGB点云。显而易见,这种点云除了结构信息之外,还存在颜色信息。将物体通过颜色分类,是人类在辨认果实的 过程中进化出的能力,颜色信息可以很好的将复杂场景中的特殊物体分割出来。比如Xbox Kinect就可以轻松的捕捉颜色点云。基于颜色的区域生长分割原理上和基于曲率,法线的分割方法是一致的。只不过比较目标换成了颜色,去掉了点云规模上 限的限制。可以认为,同一个颜色且挨得近,是一类的可能性很大,不需要上限来限制。所以这种方式比较适合用于室内场景分割。尤其是复杂室内场景,颜色分割 可以轻松的将连续的场景点云变成不同的物体。哪怕是高低不平的地面,没法用采样一致分割器抽掉,颜色分割算法同样能完成分割任务。
算法分为两步:
(1)分割,当前种子点和领域点之间色差小于色差阀值的视为一个聚类
(2)合并,聚类之间的色差小于色差阀值和并为一个聚类,且当前聚类中点的数量小于聚类点数量的与最近的聚类合并在一起
查看代码
#include <iostream> #include <vector> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/search/search.h> #include <pcl/search/kdtree.h> #include <pcl/visualization/cloud_viewer.h> #include <pcl/filters/passthrough.h> #include <pcl/segmentation/region_growing_rgb.h> int main (int argc, char** argv) { pcl::search::Search <pcl::PointXYZRGB>::Ptr tree = boost::shared_ptr<pcl::search::Search<pcl::PointXYZRGB> > (new pcl::search::KdTree<pcl::PointXYZRGB>); pcl::PointCloud <pcl::PointXYZRGB>::Ptr cloud (new pcl::PointCloud <pcl::PointXYZRGB>); if ( pcl::io::loadPCDFile <pcl::PointXYZRGB> ("region_growing_rgb_tutorial.pcd", *cloud) == -1 ) { std::cout << "Cloud reading failed." << std::endl; return (-1); } //存储点云的容器 pcl::IndicesPtr indices (new std::vector <int>); //滤波 pcl::PassThrough<pcl::PointXYZRGB> pass; pass.setInputCloud (cloud); pass.setFilterFieldName ("z"); pass.setFilterLimits (0.0, 1.0); pass.filter (*indices); //基于颜色的区域生成的对象 pcl::RegionGrowingRGB<pcl::PointXYZRGB> reg; reg.setInputCloud (cloud); reg.setIndices (indices); //点云的索引 reg.setSearchMethod (tree); reg.setDistanceThreshold (10); //距离的阀值 reg.setPointColorThreshold (6); //点与点之间颜色容差 reg.setRegionColorThreshold (5); //区域之间容差 reg.setMinClusterSize (600); //设置聚类的大小 std::vector <pcl::PointIndices> clusters; reg.extract (clusters); pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud (); pcl::visualization::CloudViewer viewer ("Cluster viewer"); viewer.showCloud (colored_cloud); while (!viewer.wasStopped ()) { boost::this_thread::sleep (boost::posix_time::microseconds (100)); } return (0); }
恩 就这样实际应用就是调参数,
-------------------------------------------------------------------------------------------------------------
------------------------------------------------------------------------------------------------------------
版权所有,转载请注明出处