深入浅出串口编程(2)
――基于
DOS
的串口编程
宋宝华
[email]21cnbao@21cn.com[/email]
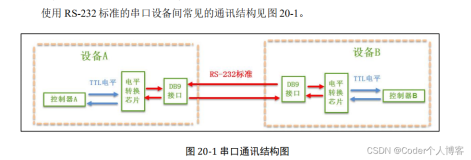
在DOS平台下,操作串口主要有下列方式:通过BIOS调用、通过串口的硬件中断或通过对串口硬件进行轮询,本章将对以上三种方式进行具体的介绍并给出例子。
1.BIOS中断
在DOS操作系统下,IBM PC及其兼容机提供了一种灵活的串口I/O访问方法,即通过INT 14H调用ROM BIOS串行通讯例行程序。当设置AH为不同的值时,产生不同的功能:
AH 0 初始化端口
AH 1 向串口写字符
AH 2 从串口读字符
AH 3 取通讯口状态
初始化端口时(即当AH=0时),需要在AL寄存器中赋一字节初始化参数,其各项意义如图1;

图1 调用INT 14H时AL寄存器设置
当向串口写字符时(即当AH=1时),AL寄存器中的字符是需要写入的字符;
当向串口写字符时(即当AH=2时),AL寄存器中的字符是需要读取的字符。
看看下面的例程:
#include <stdio.h>
#include <dos.h>
#include <bios.h>
#define STR "author:sbh"
union REGS inregs,outregs;
main()
{
//设置串口参数
init_rs232();
//写串口的例子
write_rs232(STR,strlen(STR));
//读串口的例子
read_rs232();
return(0);
}
init_rs232()
{
do{
inregs.h.ah=0; //AH=0表示初始化端口
inregs.h.al=0xe7;
inregs.x.dx=0; //COM1
int86(0x14, &inregs, &outregs);
}while(outregs.h.ah>=0x80);
return(0);
}
write_rs232(char *string, int len)
{
int i;
do{
inregs.h.ah=1;//发送AL寄存器的字符
inregs.h.al= *string;
inregs.x.dx=0;
int86(0x14, &inregs, &outregs);
}while(outregs.h.al>=0x80);
for(i=1;i<len;i++)
{
inregs.h.ah=1;
inregs.h.al=*(string+i);
inregs.x.dx=0;
int86(0x14, &inregs, &outregs);
}
}
read_rs232()
{
do{
inregs.h.ah=2; //读取AL寄存器中的字符
inregs.x.dx=0;
int86(0x14, &inregs, &outregs);
}while(outregs.h.al!=3||outregs.h.ah>=0x80);
return(0);
}
其中使用的int86函数的原型为:
int _Cdecl int86(int intno, union REGS *inregs, union REGS *outregs);
int86()函数可以调用BIOS功能,现在的程序员们已经很少接触这个函数,80%的程序员甚至都未曾见过这个函数。其实,在茹毛饮血的DOS时代,int86()函数几乎是最常用和最核心的函数之一。几乎可以说,在那个时代,不会int86()就等于不会编程。而与int86配合使用的,就是REGS这样一个联合体,定义为:
union REGS {
struct WORDREGS x;
struct BYTEREGS h;
};
其中的WORDREGS定义为:
struct WORDREGS {
unsigned int ax, bx, cx, dx, si, di,
cflag /*进位标志*/,
flags /*标志寄存器*/;
};
而BYTEREGS则定义为:
struct BYTEREGS {
unsigned char al, ah, bl, bh, cl, ch, dl, dh;
};
原来WORDREGS和BYTEREGS是16位的8086处理器内部的寄存器啊!因此,当CPU发展到286、386以后,再安装DOS也是建立在利用CPU实模式的基础上的!
另外一个函数与int86()的功能是类似的:
Int _Cdecl int86x(int intno, union REGS inregs, union REGS outregs, struct SREGS segregs);
其中的SREGS为段寄存器结构体,定义为:
struct SREGS
{
unsigned int es;
unsigned int cs;
unsigned int ss;
unsigned int ds;
};
int86和int86x这两个函数的功能都是执行一个由参数intno指定的8086软中断。在执行软中断之前,两个函数都把inregs中的内容放置到各寄存器中(int86x还把segregs.x.es和segregs.x.ds的值存到相应的段寄存器中),软中断返回后,这两个函数都把当前寄存器的值存到outregs,并把系统进位标志拷贝到outregs.s.cflag中,把8086标志寄存器值存到outregs.x.flag中(int86x还恢复DS,并设置Segregs.es和Segregs.ds的值为对应段寄存器的值)。
查阅BIOS中断调用手册,发现绝大多数调用都未用到ES和DS段寄存器,故在程序设计中经常只利用了int86函数。
2.硬件中断
为了给读者一个直观的印象,我们通过在Windows操作系统中查看COM的资源属性获得某COM对应的中断号,如图2(该对话框中设备管理器中开启)。

图2 COM中断号
实际上COM的确直接对应于一个中断,而系统也按照一定的规律为各类硬件分配了一个较固定的中断号,如表1。
表1 中断向量表
|
INT (Hex)
|
IRQ
|
Common Uses
|
|
08
|
0
|
System Timer
|
|
09
|
1
|
Keyboard
|
|
0A
|
2
|
Redirected
|
|
0B
|
3
|
Serial Comms. COM2/COM4
|
|
0C
|
4
|
Serial Comms. COM1/COM3
|
|
0D
|
5
|
Reserved/Sound Card
|
|
0E
|
6
|
Floppy Disk Controller
|
|
0F
|
7
|
Parallel Comms.
|
|
70
|
8
|
Real Time Clock
|
|
71
|
9
|
Reserved
|
|
72
|
10
|
Reserved
|
|
73
|
11
|
Reserved
|
|
74
|
12
|
PS/2 Mouse
|
|
75
|
13
|
Maths Co-Processor
|
|
76
|
14
|
Hard Disk Drive
|
|
77
|
15
|
Reserved
|
通过编写COM对应的中断服务程序,我们也可以操作串口,涉及到的相关函数有:
(1)设置中断向量表
/*dos.h*/
void _Cdecl setvect (int interruptno, void interrupt (*isr) ());
例如,COM3对应的中断号是4,那么对应中断向量表中的地址是0x0C,设置0x0C对应中断程序的函数为:
setvect(0x0C, PORT1INT);
其中的中断服务程序PORT1INT为:
void interrupt PORT1INT()
{
int c;
do
{
c = inportb(PORT1 + 5);
if (c &1)
{
buffer[bufferin] = inportb(PORT1);
bufferin++;
if (bufferin == 1024)
bufferin = 0;
}
}
while (c &1);
outportb(0x20, 0x20);
}
上述中断服务程序检查是否有字符可接收,其后将其通过inportb(PORT1)语句将其从UART中读出并放入输入buffer。持续的检查UART,以便能在一次中断里读取所有可获得的数据。
最后的“outportb(0x20,0x20);”语句告诉可编程中断控制器(Programmable Interrupt Controller,PIC)中断已经完成。
(2)读取中断向量表
/*dos.h*/
void interrupt (* _Cdecl getvect(int interruptno)) ();
例如:
oldport1isr = getvect(INTVECT);
其中的oldport1isr定义为:
void interrupt (*oldport1isr)();
我们融合setvect()函数、中断服务程序和getvect()函数,给出一个由Craig Peacock编写的完备例程:
/* Name : Sample Comm's Program - 1024 Byte Buffer - buff1024.c */
/* Written By : Craig Peacock <[email]cpeacock@senet.com.au[/email]> */
#include <dos.h>
#include <stdio.h>
#include <conio.h>
#define PORT1 0x3F8 /* Port Address Goes Here */
#define INTVECT 0x0C /* Com Port's IRQ here (Must also change PIC setting) */
/* Defines Serial Ports Base Address */
/* COM1 0x3F8 */
/* COM2 0x2F8 */
/* COM3 0x3E8 */
/* COM4 0x2E8 */
int bufferin = 0;
int bufferout = 0;
char ch;
char buffer[1025];
void interrupt(*oldport1isr)();
void interrupt PORT1INT() /* Interrupt Service Routine (ISR) for PORT1 */
{
int c;
do
{
c = inportb(PORT1 + 5);
if (c &1)
{
buffer[bufferin] = inportb(PORT1);
bufferin++;
if (bufferin == 1024)
{
bufferin = 0;
}
}
}
while (c &1);
outportb(0x20, 0x20);
}
void main(void)
{
int c;
outportb(PORT1 + 1, 0); /* Turn off interrupts - Port1 */
oldport1isr = getvect(INTVECT); /* Save old Interrupt Vector of later
recovery */
setvect(INTVECT, PORT1INT); /* Set Interrupt Vector Entry */
/* COM1 - 0x0C */
/* COM2 - 0x0B */
/* COM3 - 0x0C */
/* COM4 - 0x0B */
/* PORT 1 - Communication Settings */
outportb(PORT1 + 3, 0x80); /* SET DLAB ON */
outportb(PORT1 + 0, 0x0C); /* Set Baud rate - Divisor Latch Low Byte */
/* Default 0x03 = 38,400 BPS */
/* 0x01 = 115,200 BPS */
/* 0x02 = 57,600 BPS */
/* 0x06 = 19,200 BPS */
/* 0x0C = 9,600 BPS */
/* 0x18 = 4,800 BPS */
/* 0x30 = 2,400 BPS */
outportb(PORT1 + 1, 0x00); /* Set Baud rate - Divisor Latch High Byte */
outportb(PORT1 + 3, 0x03); /* 8 Bits, No Parity, 1 Stop Bit */
outportb(PORT1 + 2, 0xC7); /* FIFO Control Register */
outportb(PORT1 + 4, 0x0B); /* Turn on DTR, RTS, and OUT2 */
outportb(0x21, (inportb(0x21) &0xEF)); /* Set Programmable Interrupt Controller */
/* COM1 (IRQ4) - 0xEF */
/* COM2 (IRQ3) - 0xF7 */
/* COM3 (IRQ4) - 0xEF */
/* COM4 (IRQ3) - 0xF7 */
outportb(PORT1 + 1, 0x01); /* Interrupt when data received */
printf("\nSample Comm's Program. Press ESC to quit \n");
do
{
if (bufferin != bufferout)
{
ch = buffer[bufferout];
bufferout++;
if (bufferout == 1024)
{
bufferout = 0;
}
printf("%c", ch);
}
if (kbhit())
{
c = getch();
outportb(PORT1, c);
}
}
while (c != 27);
outportb(PORT1 + 1, 0);
/* Turn off interrupts - Port1 */
outportb(0x21, (inportb(0x21) | 0x10)); /* MASK IRQ using PIC */
/* COM1 (IRQ4) - 0x10 */
/* COM2 (IRQ3) - 0x08 */
/* COM3 (IRQ4) - 0x10 */
/* COM4 (IRQ3) - 0x08 */
setvect(INTVECT, oldport1isr); /* Restore old interrupt vector */
}
3.硬件查询
通过读取和写入串口UART对应的硬件端口,我们可以控制串口的收发。请看下面的例子:
/* Name : Sample Comm's Program - Polled Version - termpoll.c */
/* Written By : Craig Peacock <[email]cpeacock@senet.com.au[/email]> */
#include <dos.h>
#include <stdio.h>
#include <conio.h>
#define PORT1 0x3F8
/* Defines Serial Ports Base Address */
/* COM1 0x3F8 */
/* COM2 0x2F8 */
/* COM3 0x3E8 */
/* COM4 0x2E8 */
void main(void)
{
int c;
int ch;
outportb(PORT1 + 1, 0); /* Turn off interrupts - Port1 */
/* PORT 1 - Communication Settings */
outportb(PORT1 + 3, 0x80); /* SET DLAB ON */
outportb(PORT1 + 0, 0x03); /* Set Baud rate - Divisor Latch Low Byte */
/* Default 0x03 = 38,400 BPS */
/* 0x01 = 115,200 BPS */
/* 0x02 = 57,600 BPS */
/* 0x06 = 19,200 BPS */
/* 0x0C = 9,600 BPS */
/* 0x18 = 4,800 BPS */
/* 0x30 = 2,400 BPS */
outportb(PORT1 + 1, 0x00); /* Set Baud rate - Divisor Latch High Byte */
outportb(PORT1 + 3, 0x03); /* 8 Bits, No Parity, 1 Stop Bit */
outportb(PORT1 + 2, 0xC7); /* FIFO Control Register */
outportb(PORT1 + 4, 0x0B); /* Turn on DTR, RTS, and OUT2 */
printf("\nSample Comm's Program. Press ESC to quit \n");
do
{
c = inportb(PORT1 + 5); /* Check to see if char has been */
/* received. */
if (c &1)
{
ch = inportb(PORT1); /* If so, then get Char */
printf("%c", ch);
} /* Print Char to Screen */
if (kbhit())
{
ch = getch(); /* If key pressed, get Char */
outportb(PORT1, ch);
} /* Send Char to Serial Port */
}
while (ch != 27); /* Quit when ESC (ASC 27) is pressed */
}
程序中的
c = inportb(PORT1 + 5); /* Check to see if char has been */
/* received. */
if (c &1)
检查PORT1 + 5端口地址,通过c&1可以判断是否有数据被UART接收到。关于UART对应的端口范围,从图2中也可以直观地看出。
本文转自 21cnbao 51CTO博客,原文链接:http://blog.51cto.com/21cnbao/120291,如需转载请自行联系原作者