引言
腾讯的前端模板引擎,不逊于doT.js
1.引入
<script type="text/javascript" src="../plugin/artTemplate/template.js"></script>
<!-- jquery 移动端替代品 -->
<script type="text/javascript" src="../script/zepto.min.js"></script>
<!--<script type="text/javascript" src="../script/jquery.min.js"></script>-->2.代码
<div id="content"></div>
<script id="test" type="text/html">
<h1>{{title}}</h1>
<ul>
{{each list as value i}}
<li>索引 {{i + 1}} :{{value}}</li>
{{/each}}
</ul>
</script>
<script>
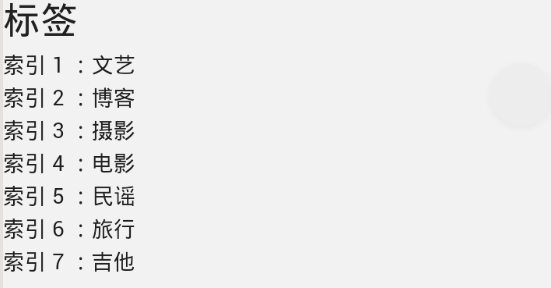
var data = {
title: '标签',
list: ['文艺', '博客', '摄影', '电影', '民谣', '旅行', '吉他']
};
var html = template('test', data);
document.getElementById('content').innerHTML = html;
</script>3.结果
本文转自TBHacker博客园博客,原文链接:http://www.cnblogs.com/jiqing9006/p/5945684.html,如需转载请自行联系原作者



![[开源]手把手教你制作锂电池快充充电器](https://ucc.alicdn.com/pic/developer-ecology/7b96d3bf21dd434894c3c95436eb1ae8.jpg?x-oss-process=image/resize,h_160,m_lfit)