论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline
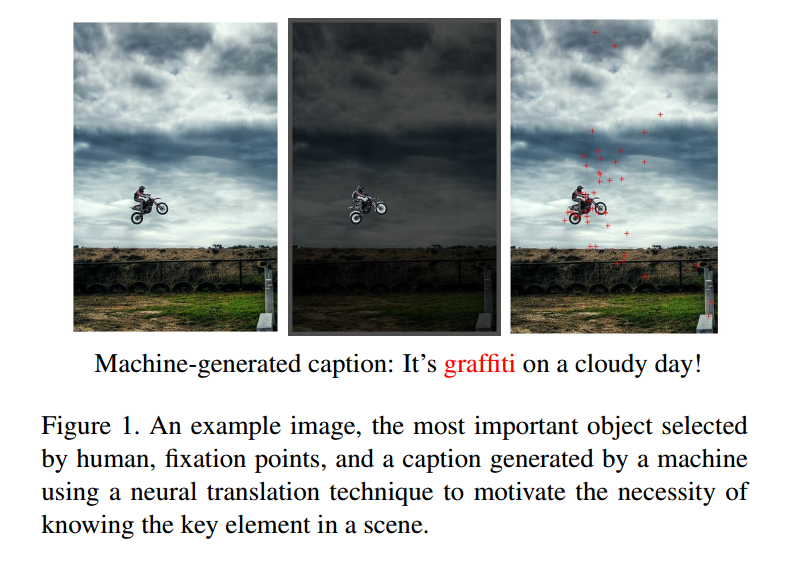
如上图所示,本文旨在解决一个问题:给定一张图像,我们最应该关注哪些区域?怎么将其分割出来?这是一个什么东东?这三个子问题为一体。
Problem formulation: Given an image, determine the most influential item in the scene in terms of region of interest, pixel-level extent (segmentation), and object type.
作者提出的框架为:
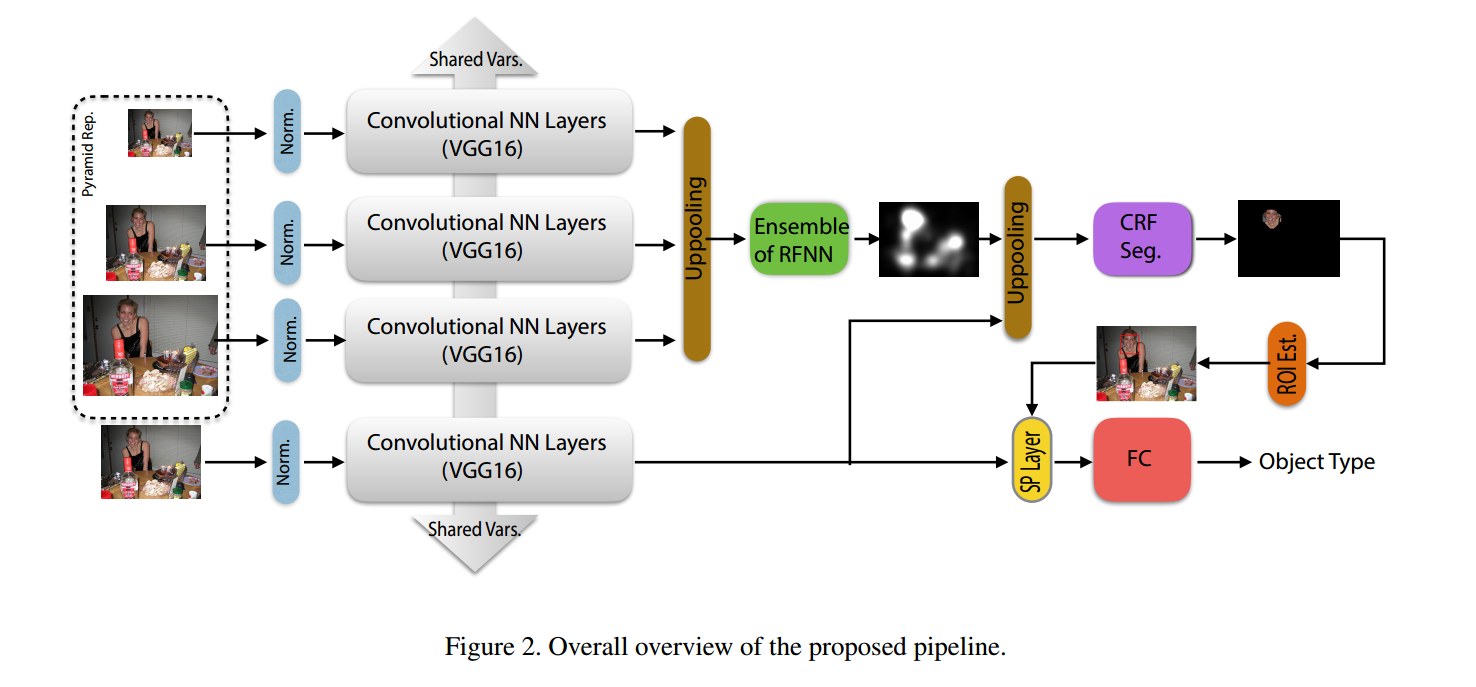
可以发现,上述流程图就是各个需要完成任务的级联和组合。
网络的训练也是各个级别依次完成的。没啥好说的。
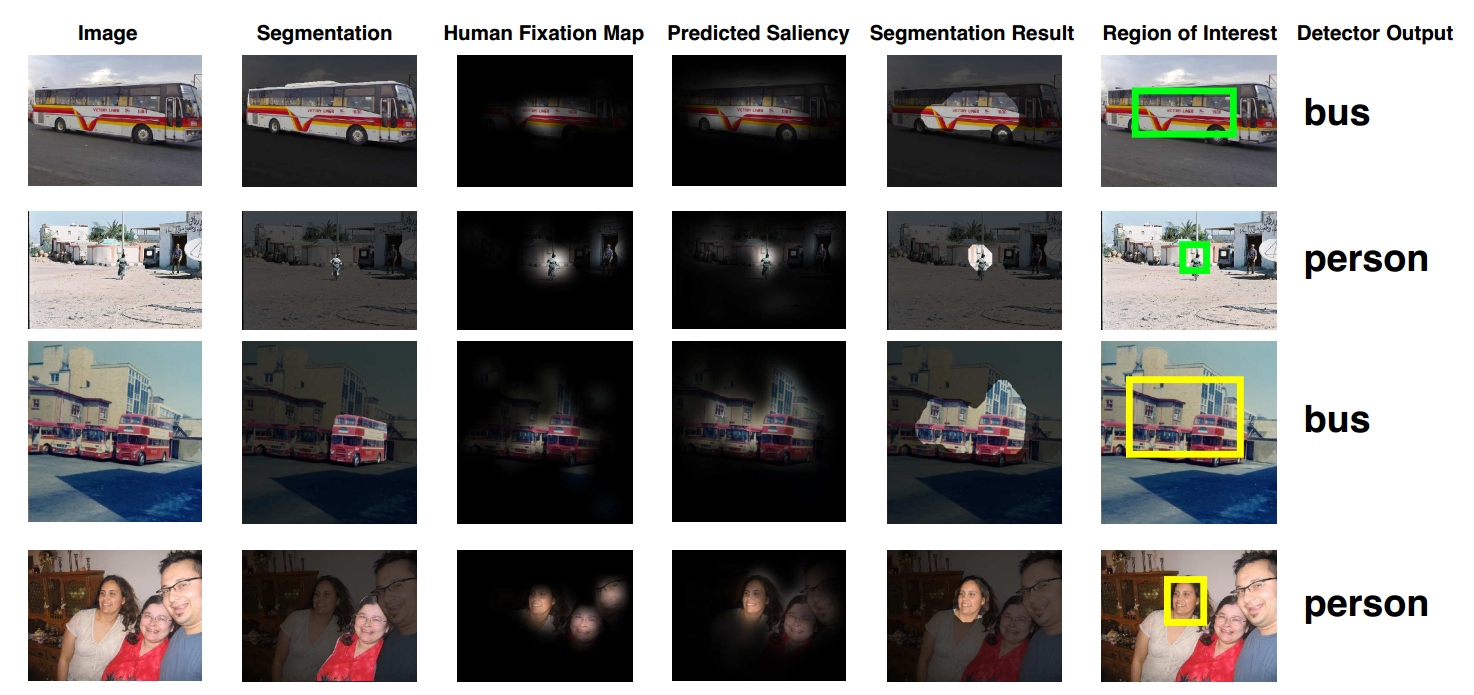
有些实验结果看起来还是挺烂的:
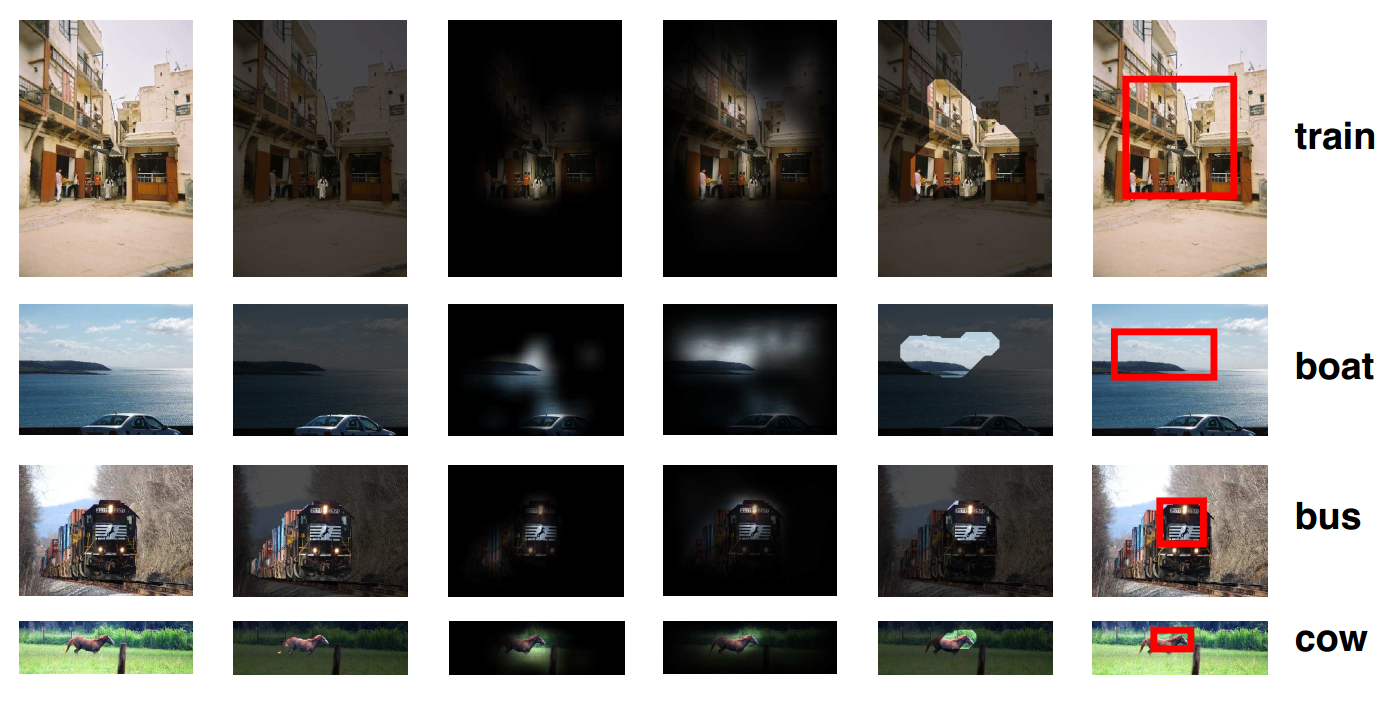
有的看起来还可以,但是也不怎么好: