一提到“A*算法”,可能很多人都有"如雷贯耳"的感觉。用最白话的语言来讲:把游戏中的某个角色放在一个网格环境中,并给定一个目标点和一些障碍物,如何让角色快速“绕过障碍物”找出通往目标点的路径。(如下图)
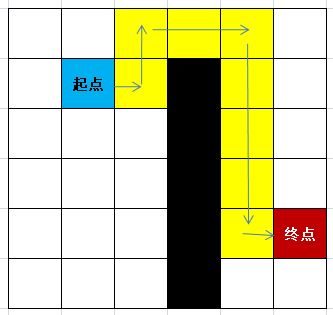
在寻路过程中,角色总是不停从一个格子移动到另一个相邻的格子,如果单纯从距离上讲,移动到与自身斜对角的格子走的距离要长一些,而移动到与自身水平或垂直方面平行的格子,则要近一些。为了描述这种区别,先引入二个概念:
节点(Node):每个格子都可以称为节点。
代价(Cost):描述角色移动到某个节点时所走的距离(或难易程度)。
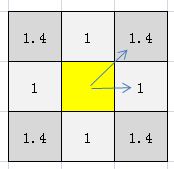
如上图,如果每水平或垂直方向移动相邻一个节点所花的代价记为1,则相邻对角节点的代码为1.4(即2的平方根--勾股定理)
通常寻路过程中的代价用f,g,h来表示
g代表(从指定节点到相邻)节点本身的代价--即上图中的1或1.4
h代表从指定节点到目标节点(根据不同的估价公式--后面会解释估价公式)估算出来的代价。
而 f = g + h 表示节点的总代价,为了方便后面的代码描述,这里把节点封装成一个类Node.as
package {
public class Node
{
public var x:int;
public var y:int;
public var f:Number;
public var g:Number;
public var h:Number;
public var walkable:Boolean=true;//是否可穿越(通常把障碍物节点设置为false)
public var parent:Node;
public var costMultiplier:Number=1.0;//代价因子
public function Node(x:int, y:int)
{
this.x=x;
this.y=y;
}
}
}
注意:这里有二个新的东东walkable和parent。
通常障碍物本身也可以看成是由若干个不可通过的节点所组成,所以walkable实际上是用来标记该节点是否为障碍物(节点)。
另外:在考查从一个节点移动到另一个节点时,总是拿自身节点周围的8个相邻节点来说事儿,相对于周边的节点来讲,自身节点称为它们的父节点(parent).
前面一直在提“网格,网格”,干脆把它也封装成类Grid.as
package
{
public class Grid
{
private var _startNode:Node;//开始节点
private var _endNode:Node;//目标节点
private var _nodes:Array;//节点数组
private var _numCols:int;//列数
private var _numRows:int;//行数
public function Grid(numCols:int, numRows:int)
{
_numCols=numCols;
_numRows=numRows;
_nodes=new Array();
for (var i:int=0; i < _numCols; i++)
{
_nodes[i]=new Array();
for (var j:int=0; j < _numRows; j++)
{
_nodes[i][j]=new Node(i, j);
}
}
}
public function getNode(x:int, y:int):Node
{
return _nodes[x][y] as Node;
}
public function setEndNode(x:int, y:int):void
{
_endNode=_nodes[x][y] as Node;
}
public function setStartNode(x:int, y:int):void
{
_startNode=_nodes[x][y] as Node;
}
public function setWalkable(x:int, y:int, value:Boolean):void
{
_nodes[x][y].walkable=value;
}
public function get endNode():Node
{
return _endNode;
}
public function get numCols():int
{
return _numCols;
}
public function get numRows():int
{
return _numRows;
}
public function get startNode():Node
{
return _startNode;
}
}
}
然而,在寻路的过程中“条条道路通罗马”,路径通常不止一条,只不过所花的代价不同而已
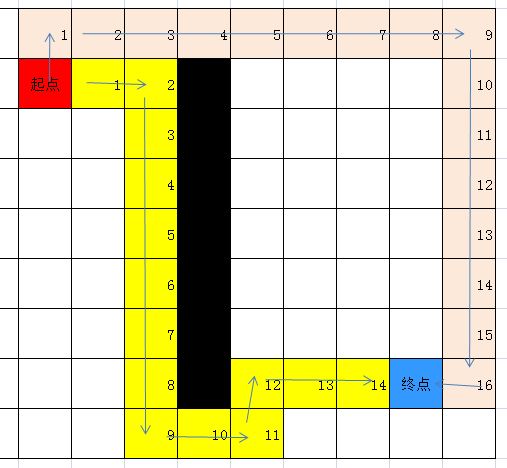
如上图,如果按照黄色路径走,所花的总代价是14,而按照粉红色路径走,所花的总代价是16,所以我们要做的事情,就是要尽最大努力找一条代价最小的路径。
但是,“好事总多磨”,即使是代价相同的最佳路径,也有可能出现不同的走法:
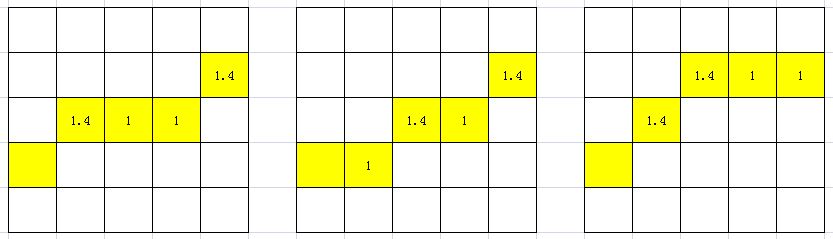
上图中三种不同的走法,总代价都是4.8,就上图而言,最佳路径(最小代价)用肉眼就能很快找出来,但是用代码如何估算起点与终点之间的代价呢?
//曼哈顿估价法
private function manhattan(node:Node):Number
{
return Math.abs(node.x - _endNode.x) * _straightCost + Math.abs(node.y + _endNode.y) * _straightCost;
}
//几何估价法
private function euclidian(node:Node):Number
{
var dx:Number=node.x - _endNode.x;
var dy:Number=node.y - _endNode.y;
return Math.sqrt(dx * dx + dy * dy) * _straightCost;
}
//对角线估价法
private function diagonal(node:Node):Number
{
var dx:Number=Math.abs(node.x - _endNode.x);
var dy:Number=Math.abs(node.y - _endNode.y);
var diag:Number=Math.min(dx, dy);
var straight:Number=dx + dy;
return _diagCost * diag + _straightCost * (straight - 2 * diag);
}
上面的代码给出了三种基本的估价算法(也称估价公式),其算法示意图如下:
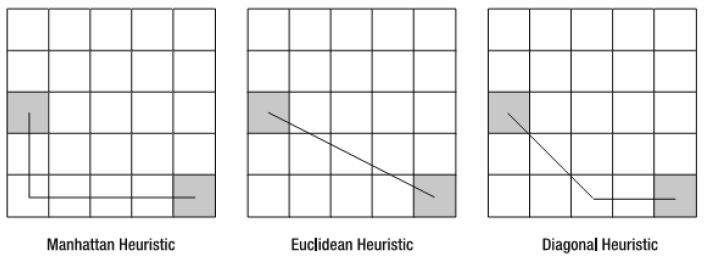
如上图,对于“曼哈顿算法”最贴切的描述莫过于孙燕姿唱过的那首成名曲“直来直往”,笔直的走,然后转个弯,再笔直的继续。
“几何算法”的最好解释就是“勾股定理”,算出起点与终点之间的直线距离,然后乘上代价因子。
“对角算法”综合了以上二种算法,先按对角线走,一直走到与终点水平或垂直平行后,再笔直的走。
我们可以针对刚才的情况做下测试:
package
{
import flash.display.Sprite;
public class GridTest extends Sprite
{
private var _endNode:Node;
private var _startNode:Node;
private var _straightCost:Number=1.0;
private var _diagCost:Number = 1.4;
public function GridTest()
{
var g:Grid=new Grid(5, 5);
g.setStartNode(0, 3);
g.setEndNode(4, 1);
_endNode = g.endNode;
_startNode = g.startNode;
var c1:Number = manhattan(_startNode);//8
var c2:Number = euclidian(_startNode);//4.47213595499958
var c3:Number = diagonal(_startNode);//4.8
trace(c1,c2,c3);
}
//曼哈顿估价法
private function manhattan(node:Node):Number
{
return Math.abs(node.x - _endNode.x) * _straightCost + Math.abs(node.y - _endNode.y) * _straightCost;
}
//几何估价法
private function euclidian(node:Node):Number
{
var dx:Number=node.x - _endNode.x;
var dy:Number=node.y - _endNode.y;
return Math.sqrt(dx * dx + dy * dy) * _straightCost;
}
//对角线估价法
private function diagonal(node:Node):Number
{
var dx:Number=Math.abs(node.x - _endNode.x);
var dy:Number=Math.abs(node.y - _endNode.y);
var diag:Number=Math.min(dx, dy);
var straight:Number=dx + dy;
return _diagCost * diag + _straightCost * (straight - 2 * diag);
}
}
}
从输出结果可以看到“对角线估价法”跟肉眼预测的实际结果完全一致,总代价为4.8,以后默认情况下就用它了,不过这里提醒一下:这种代价是大概估计出来的,没有考虑到障碍物的因素,并非寻路过程中的实际代价,所以这也是“估价计算公式”而非“代价计算公式”得名的由来。
