前文在Win32平台上用C++实现了事件对象Event,对线程进行同步,以达到期望目的。这次在Linux平台上实现与之类似的事件对象。与其相关的一组API包括:pthread_mutex_init,pthread_cond_init,pthread_mutex_lock,pthread_cond_wait,pthread_mutex_unlock,pthread_cond_broadcast,pthread_cond_timedwait,pthread_cond_destroy,pthread_mutex_destroy。这些API的说明可以在这里找到:http://www.9linux.com/。下边,是封装的事件对象类,以及测试代码。使用VS2005编辑,在虚拟机 Fedora 13中编译,测试通过。
MyEvent.h
- #ifndef My_Event_Header
- #define My_Event_Header
- #include <iostream>
- #include <pthread.h>
- #include <errno.h>
- using namespace std;
- //---------------------------------------------------------------
- class CEventImpl
- {
- protected:
- /*
- 动态方式初始化互斥锁,初始化状态变量m_cond
- `bAutoReset true 人工重置
- false 自动重置
- */
- CEventImpl(bool manualReset);
- /*
- 注销互斥锁,注销状态变量m_cond
- */
- ~CEventImpl();
- /*
- 将当前事件对象设置为有信号状态
- 若自动重置,则等待该事件对象的所有线程只有一个可被调度
- 若人工重置,则等待该事件对象的所有线程变为可被调度
- */
- void SetImpl();
- /*
- 以当前事件对象,阻塞线程,将其永远挂起
- 直到事件对象被设置为有信号状态
- */
- bool WaitImpl();
- /*
- 以当前事件对象,阻塞线程,将其挂起指定时间间隔
- 之后线程自动恢复可调度
- */
- bool WaitImpl(long milliseconds);
- /*
- 将当前事件对象设置为无信号状态
- */
- void ResetImpl();
- private:
- bool m_manual;
- volatile bool m_state;
- pthread_mutex_t m_mutex;
- pthread_cond_t m_cond;
- };
- inline void CEventImpl::SetImpl()
- {
- if (pthread_mutex_lock(&m_mutex))
- cout<<"cannot signal event (lock)"<<endl;
- //设置状态变量为true,对应有信号
- m_state = true;
- //cout<<"CEventImpl::SetImpl m_state = "<<m_state<<endl;
- //重新激活所有在等待m_cond变量的线程
- if (pthread_cond_broadcast(&m_cond))
- {
- pthread_mutex_unlock(&m_mutex);
- cout<<"cannot signal event"<<endl;
- }
- pthread_mutex_unlock(&m_mutex);
- }
- inline void CEventImpl::ResetImpl()
- {
- if (pthread_mutex_lock(&m_mutex))
- cout<<"cannot reset event"<<endl;
- //设置状态变量为false,对应无信号
- m_state = false;
- //cout<<"CEventImpl::ResetImpl m_state = "<<m_state<<endl;
- pthread_mutex_unlock(&m_mutex);
- }
- //---------------------------------------------------------------
- class CMyEvent: private CEventImpl
- {
- public:
- CMyEvent(bool bManualReset = true);
- ~CMyEvent();
- void Set();
- bool Wait();
- bool Wait(long milliseconds);
- bool TryWait(long milliseconds);
- void Reset();
- private:
- CMyEvent(const CMyEvent&);
- CMyEvent& operator = (const CMyEvent&);
- };
- inline void CMyEvent::Set()
- {
- SetImpl();
- }
- inline bool CMyEvent::Wait()
- {
- return WaitImpl();
- }
- inline bool CMyEvent::Wait(long milliseconds)
- {
- if (!WaitImpl(milliseconds))
- {
- cout<<"time out"<<endl;
- return false;
- }
- else
- {
- return true;
- }
- }
- inline bool CMyEvent::TryWait(long milliseconds)
- {
- return WaitImpl(milliseconds);
- }
- inline void CMyEvent::Reset()
- {
- ResetImpl();
- }
- #endif
MyEvent.cpp
- #include "MyEvent.h"
- #include <sys/time.h>
- CEventImpl::CEventImpl(bool manualReset): m_manual(manualReset), m_state(false)
- {
- if (pthread_mutex_init(&m_mutex, NULL))
- cout<<"cannot create event (mutex)"<<endl;
- if (pthread_cond_init(&m_cond, NULL))
- cout<<"cannot create event (condition)"<<endl;
- }
- CEventImpl::~CEventImpl()
- {
- pthread_cond_destroy(&m_cond);
- pthread_mutex_destroy(&m_mutex);
- }
- bool CEventImpl::WaitImpl()
- {
- if (pthread_mutex_lock(&m_mutex))
- {
- cout<<"wait for event failed (lock)"<<endl;
- return false;
- }
- while (!m_state)
- {
- //cout<<"CEventImpl::WaitImpl while m_state = "<<m_state<<endl;
- //对互斥体进行原子的解锁工作,然后等待状态信号
- if (pthread_cond_wait(&m_cond, &m_mutex))
- {
- pthread_mutex_unlock(&m_mutex);
- cout<<"wait for event failed"<<endl;
- return false;
- }
- }
- if (m_manual)
- m_state = false;
- pthread_mutex_unlock(&m_mutex);
- //cout<<"CEventImpl::WaitImpl end m_state = "<<m_state<<endl;
- return true;
- }
- bool CEventImpl::WaitImpl(long milliseconds)
- {
- int rc = 0;
- struct timespec abstime;
- struct timeval tv;
- gettimeofday(&tv, NULL);
- abstime.tv_sec = tv.tv_sec + milliseconds / 1000;
- abstime.tv_nsec = tv.tv_usec*1000 + (milliseconds % 1000)*1000000;
- if (abstime.tv_nsec >= 1000000000)
- {
- abstime.tv_nsec -= 1000000000;
- abstime.tv_sec++;
- }
- if (pthread_mutex_lock(&m_mutex) != 0)
- {
- cout<<"wait for event failed (lock)"<<endl;
- return false;
- }
- while (!m_state)
- {
- //自动释放互斥体并且等待m_cond状态,并且限制了最大的等待时间
- if ((rc = pthread_cond_timedwait(&m_cond, &m_mutex, &abstime)))
- {
- if (rc == ETIMEDOUT) break;
- pthread_mutex_unlock(&m_mutex);
- cout<<"cannot wait for event"<<endl;
- return false;
- }
- }
- if (rc == 0 && m_manual)
- m_state = false;
- pthread_mutex_unlock(&m_mutex);
- return rc == 0;
- }
- CMyEvent::CMyEvent(bool bManualReset): CEventImpl(bManualReset)
- {
- }
- CMyEvent::~CMyEvent()
- {
- }
下边是测试代码
- // pthread_event.cpp : 定义控制台应用程序的入口点。
- //
- #include <unistd.h>
- #include "MyEvent.h"
- #define PRINT_TIMES 10
- //创建一个人工自动重置事件对象
- CMyEvent g_myEvent;
- int g_iNum = 0;
- //线程函数1
- void * ThreadProc1(void *pParam)
- {
- for (int i = 0; i < PRINT_TIMES; i++)
- {
- g_iNum++;
- cout<<"ThreadProc1 do print, Num = "<<g_iNum<<endl;
- //设置事件为有信号状态
- g_myEvent.Set();
- sleep(1);
- }
- return (void *)0;
- }
- //线程函数2
- void * ThreadProc2(void *pParam)
- {
- bool bRet = false;
- while ( 1 )
- {
- if ( g_iNum >= PRINT_TIMES )
- {
- break;
- }
- //以当前事件对象阻塞本线程,将其挂起
- bRet = g_myEvent.Wait();
- if ( bRet )
- {
- cout<<"ThreadProc2 do print, Num = "<<g_iNum<<endl;
- //设置事件为无信号状态
- g_myEvent.Reset();
- }
- else
- {
- cout<<"ThreadProc2 system exception"<<endl;
- }
- }
- return (void *)0;
- }
- int main(int argc, char* argv[])
- {
- pthread_t thread1,thread2;
- pthread_attr_t attr1,attr2;
- //创建两个工作线程
- pthread_attr_init(&attr1);
- pthread_attr_setdetachstate(&attr1,PTHREAD_CREATE_JOINABLE);
- if (pthread_create(&thread1,&attr1, ThreadProc1,NULL) == -1)
- {
- cout<<"Thread 1: create failed"<<endl;
- }
- pthread_attr_init(&attr2);
- pthread_attr_setdetachstate(&attr2,PTHREAD_CREATE_JOINABLE);
- if (pthread_create(&thread2,&attr2, ThreadProc2,NULL) == -1)
- {
- cout<<"Thread 2: create failed"<<endl;
- }
- //等待线程结束
- void *result;
- pthread_join(thread1,&result);
- pthread_join(thread2,&result);
- //关闭线程,释放资源
- pthread_attr_destroy(&attr1);
- pthread_attr_destroy(&attr2);
- int iWait;
- cin>>iWait;
- return 0;
- }
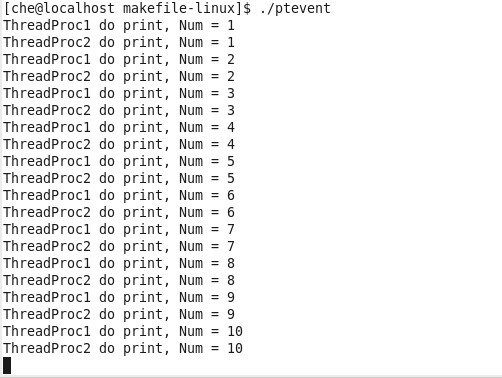
编译,运行。可以看到,与Win32平台上的测试结果相同,好神奇!