随着信息化、自动化时代的到来,为了提高生产过程或是质量检测监督中的智能化程度,目前对信号的处理广泛的采用了机器视觉技术。我们知道一般机器视觉系统获取的都是一些模拟信号,要想能够对信号进行识别或是处理,就需要将这些模拟信号转换成数字信号。图像采集卡是连接图像采集部分与处理部分,通过图像采集卡可以接收相机获取的模拟视频信号,经过其对此信号的采集、量化,最终转换成数字信号,并输入、存储到输出设备中。
机器视觉技术.jpg
一般情况下图像信号的传输对速度有着很高的要求,普通的传输接口是不能满足要求的,那么这时,还是需要图像采集卡来起到一个辅助的作用的。
采集卡有多种种类、规格。但尽管其设计和特性不同,大多数采集卡的基本原理相同。近年来,数字视频产品取得了显著发展。数字视频产品通常需要对动态图像进行实时采集和处理,因此产品性能受图像采集卡的性能影响很大。由于早期图像采集卡以帧存为核心,处理图像时需读写帧存,对于动态画面还需“冻结”图像,同时由于数据传输速率的限制,因此图像处理速度缓慢。90年代初,INTEL公司提出了PCI(Peripheral Component Interconnect)局部总线规范。PCI总线数据传宽度为32/64位,允许系统设备直接或间接连接其上,设备间可通过局部总线完成数据的快速传送,从而较好地解决了数据传输的瓶颈问题。
选择采集卡需要考虑的重点
接口制式,数据格式
接口制式包括数字(Camera Link、LVDS/RS422)、模拟(PAL、NTSC、CCIR、RS170/EIA、非标准模拟制式)一定与视觉系统所选用相机一致。如选用数字制式还必须考虑相机的数字位数。
模拟采集卡要考虑数字化精度
模拟采集卡的数字化精度主要包括两个方面即
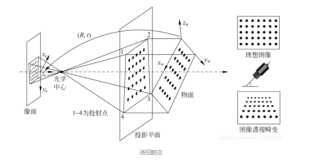
像素抖动Pixel Jitter
像素抖动是由图像采集卡的A/D转换器的采样时钟的误差产生的像元位置上的微小的错误从而导致对距离测量的错误。如图6所示。
灰度噪音Grey-Scale Noise
图像采集卡的数字化转换的过程包括对模拟视频信号的放大和对其亮度(灰度值)进行测量。在此过程中会有一定的噪声和动态波动由图像采集卡的电路产生。
如像素抖动一样,灰度噪声将导致对距离测量的错误。典型的灰度噪声为0.7个灰度单元,表示为0.7LSB。
数字采集卡要考虑数据率大小
计算数字采集卡的数据率是否满足系统的要求可按下列公式计算:
Data Rate(Grabber)>1.2 * Data Rate(Camera)
Data Rate(Camera)=R f d / 8
式中Data Rate(Grabber)为采集卡的数据率,Data Rate(Camera)为相机的数据率,R为相机的分辨率,f为相机的帧频,d为相机的数字深度(或称灰度级)。
Memory大小, PCI总线的传输速率
PCI总线可支持BUS Master设备以132MB/s突发速率传输数据。而其平均持续数据传输率一般在50-90MB/s。
来自相机的数据总是以一个固定的速率传输的。如果PCI总线可以维持大于视频数据率的平均持续数据传输率,问题看起来就解决了。然而实际上并不是这么简单,PCI总线设备只能以突发的方式向总线传输数据。图像采集卡必须将每一突发之间的连续的图像数据保存起来。解决的方法就是采用On-board Memory。有些厂家出于经济方面的考虑去除了Memory而采用数据缓存队列(FIFO),FIFO的大小一般以足以保存一行图像数据为限。然而,当图像数据的速率大于PCI的持续数据传输率时FIFO就不起作用了。
相机控制信号及外触发信号
使图像采集卡的时序电路与外部视频信号的时序电路同步,需要采用锁相环电路或数字时钟同步电路。
外触发:由外部事件启动采集的过程。
同步触发:不改变相机与板卡之间的同步关系,采集从下一个场有效信号开始。
异步触发:改变相机与板卡的同步关系,采集从相机复位后的第一个场有效信号开始。
当视觉系统要对运动中目标进行检测时,相机和采集卡必须要具备异步触发的功能。
硬件系统的可靠性
硬件的可靠性在生产系统中是十分重要的,由设备故障而停产造成的损失远远大于设备本身。很多板卡厂家并没有标明如平均无故障时间等可靠性指标。
这里有两个经验性的技巧用以评估不同板卡的可靠性,板上的器件的数量和功耗。
试着去选择具有更低功耗的采集卡。在其它条件都同等的情况下一块复杂具有更多器件的卡会比器件较少的卡耗散更多的热量。好的设计会采用更多的ASIC(Application-specific integrated circuits)和可编程器件以减少电子器件的数量,而达到更高的功能。你还可以选择具有更少的无用功能的卡以减少不必要的麻烦。
过压保护是可靠性的一个重要指标。接近高压会在视频电缆产生很强的电涌,在视频输入端和I/O口加过压保护电路可保护采集卡不会被工业环境电磁干扰会产生的高压击穿。
支持软件的功能
大多采集卡的厂商多是把其采集卡和其专用图像处理软件捆绑销售的,朗锐智科(www.lrist.com)认为在选择采集卡的同时还必须考虑此视觉系统要选用的软件与采集卡是否兼容。
随着机器视觉技术的不断发展,采集卡的技术也在不断加强,功能也在不断更新。如何选择适合视觉系统的采集卡对于一个视觉系统能否正常运行将起到很关键的作用。