热门
让你的文档从静态展示到一键部署可操作验证
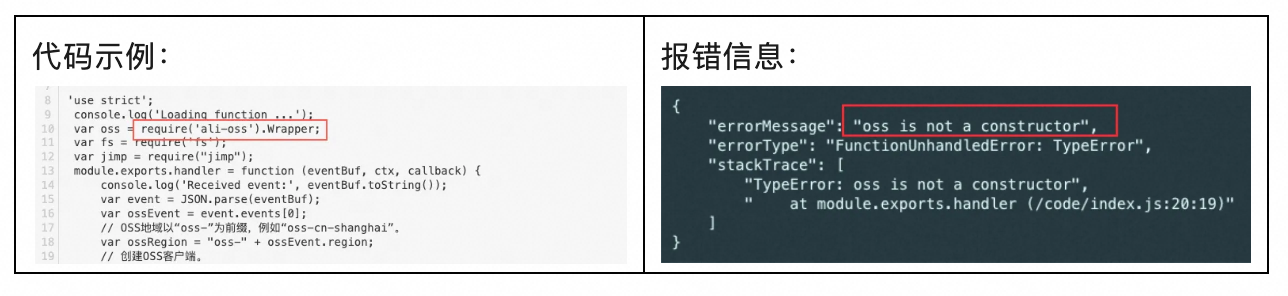
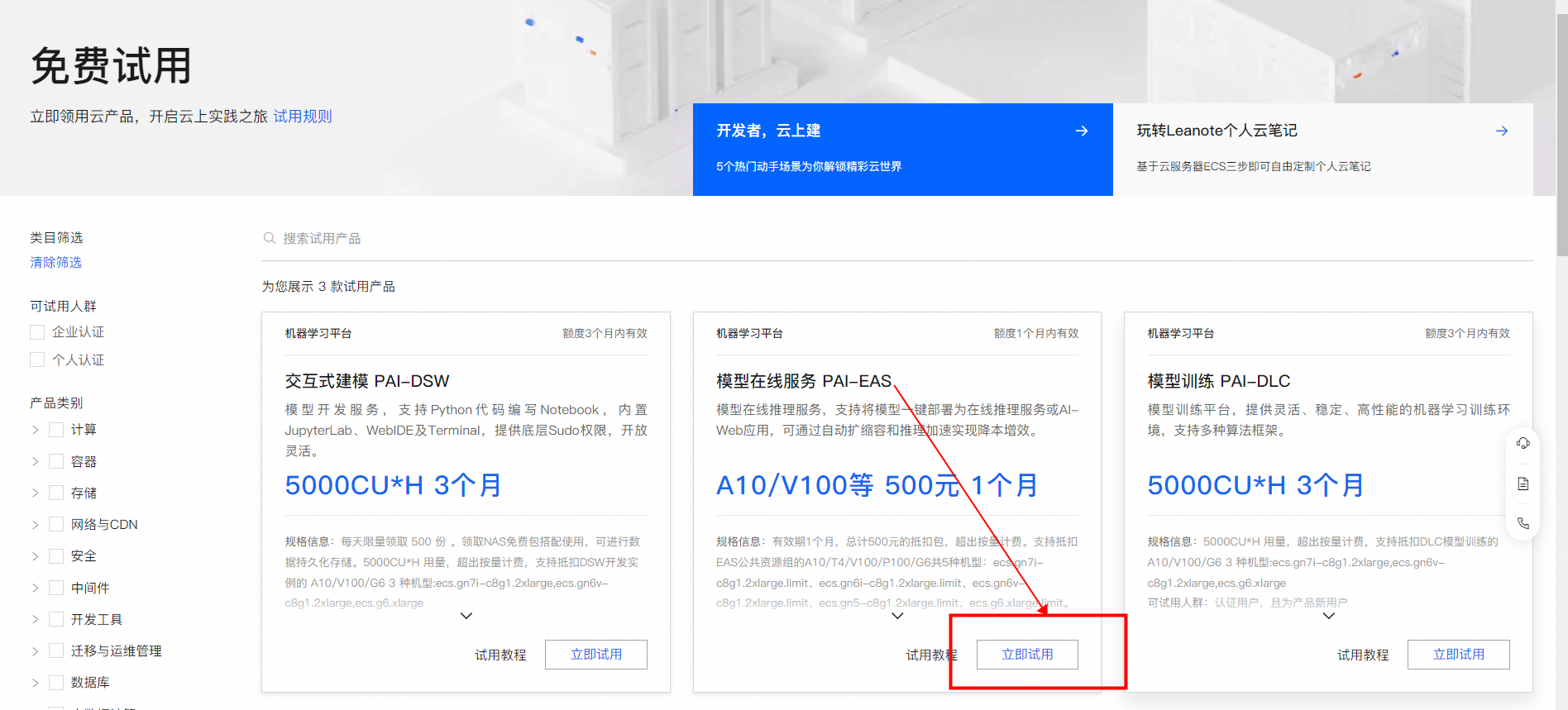
一键生成视频!用 PAI-EAS 部署 AI 视频生成模型 SVD 工作流
探索Python中的异步编程:从回调到async/await
Servlet 教程 之 Servlet 服务器 HTTP 响应 1
Servlet 教程 之 Servlet 客户端 HTTP 请求 3
《Python中的装饰器:提升代码可读性与复用性》
Servlet 教程 之 Servlet 客户端 HTTP 请求 2
深入理解自动化测试框架Selenium的设计与实现
css的类型
css元素
css基本结构
使用Python实现时间序列预测模型
JavaScript的数据类型主要分为两大类:基本数据类型和引用数据类型
JavaScript的基本语法是编程的基础
js的基本属性
C#编程入门:从零开始的旅程
探索 C#编程的奥秘与魅力
C#编程基础知识详解
掌握 C#编程:关键技术与实践
深入了解 C#编程的核心概念
C#编程实战:项目案例分析
2023年上半年信息系统项目管理师___综合知识真题与答案解释(2)
提升 C#编程效率的技巧与方法
Java基础教程(11)-Java中的集合类
C#编程中的错误处理与调试
优化 C#编程性能的策略
C#编程与数据库交互的实现
.waitKey(0)
中文路径优化
cvtColor
如何使用Python的Plotly库创建交互式图表?
请解释Python中的Sklearn库以及它的主要用途。
使用Python的Statsmodels库进行时间序列分析
请解释Python中的BeautifulSoup库以及它的主要用途。
使用Python的Requests库进行网络请求和抓取网页数据
Python中的正则表达式以及如何使用它们进行文本处理
使用Python的Pandas库进行数据透视表(pivot table)操作
Python中的聚类分析以及如何使用Sklearn库进行聚类。
如何使用Python的Keras库构建神经网络模型?
平台设计-概念澄清说明
平台组成-内容管理
平台组成-用户管理
平台组成-系统管理
平台组成-门户系统
平台设计-多数据源支持
深入理解操作系统的内存管理
平台设计-代码字段与标签
平台设计-固定表结构与可自定义表结构
开发语言漫谈-Vue
开发语言漫谈-PHP