本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48379799 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于openCV
OpenCV于1999年由Intel建立,如今由Willow Garage提供支持。OpenCV是一个基于(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows和Mac OS操作系统上。它轻量级而且高效——由一系列C函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
下载地址:
http://opencv.org/downloads.html
2,开发环境搭建
参考之前的文章,主要是ubuntu安装了ROS就可以使用openCV。
Lubuntu 15.04也可以安装ROS,参考之前写的文章:
http://blog.csdn.net/freewebsys/article/details/48466543
3,开发第一个hello world 显示图片
http://docs.opencv.org/doc/tutorials/introduction/linux_gcc_cmake/linux_gcc_cmake.html
编写demo1.cpp代码:
#include <stdio.h>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char **argv) {
Mat image;
//读取图片
image = imread("lena.jpg", 1);
if (!image.data) {
cout << "No image data \n" << endl;
return -1;
}
namedWindow("Display Image", WINDOW_AUTOSIZE);
imshow("Display Image", image);
waitKey(0);
return 0;
}关于Cmake:
CMake 是一个跨平台的自动化建构系统,它使用一个名为 CMakeLists.txt 的文件来描述构建过程,可以产生标准的构建文件,如 Unix 的 Makefile 或Windows Visual C++ 的 projects/workspaces 。文件 CMakeLists.txt 需要手工编写,也可以通过编写脚本进行半自动的生成。CMake 提供了比 autoconfig 更简洁的语法。
编辑:CMakeLists.txt
cmake_minimum_required(VERSION 3.0)
project(demo1)
find_package( OpenCV REQUIRED )
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
set(SOURCE_FILES demo1.cpp)
add_executable(demo1 ${SOURCE_FILES})
target_link_libraries( demo1 ${ALL_LIB_RAF} ${OpenCV_LIBS} )执行:必须有一张叫lena.jpg 的图像。
cmake .
make
./demo1 
4,视频demo
首先使用的是virtualbox环境开发,好处是开发方便,Linux环境。
但是没有办法调用摄像头,其实还是可以使用摄像头的。
首先下载:”Oracle VM VirtualBox” 和 “Oracle VM VirtualBox Extension Pack”
http://www.oracle.com/technetwork/server-storage/virtualbox/downloads/index.html
安装Virtualbox和Extension Pack。
首先启动virtualbox虚拟机,查询摄像头id。增加到虚拟机上面。
$ VBoxManage list webcams
Video Input Devices: 1
.1 "FaceTime HD Camera"
CC24399GSAD99VVD3
$ VBoxManage controlvm "Lubuntu" webcam attach CC24399GSAD99VVD3必须启动虚拟机否则报错:
VBoxManage: error: Machine 'Lubuntu' is not currently running一次执行就可以,以后可以正常使用了。
编辑demo2.cpp
#include <stdio.h>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char **argv) {
VideoCapture capture(0);
while(1){
Mat frame;
capture >> frame;
imshow("read video" , frame);
waitKey(30);
}
return 0;
}编辑CMakeLists.txt:
cmake_minimum_required(VERSION 3.0)
project(demo2)
find_package( OpenCV REQUIRED )
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
set(SOURCE_FILES demo2.cpp)
add_executable(demo2 ${SOURCE_FILES})
target_link_libraries( demo2 ${ALL_LIB_RAF} ${OpenCV_LIBS} )编译&执行:
cmake .
make
./demo2这样就可以使用宿主的摄像头了。

5,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48379799 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
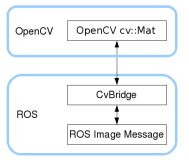
使用Lubuntu开发openCV还是非常方便的。在ROS系统下openCV非常重要。只有机器人能够识别物体之后才能进行操作。