本节书摘来自华章社区《机器人与数字人:基于MATLAB的建模与控制》一书中的第2章,第2.1节向量、坐标变换和空间描述,作者[美]顾友谅(Edward Y.L.Gu),更多章节内容可以访问云栖社区“华章社区”公众号查看
2.1向量、坐标变换和空间描述
一般情况下,一个向量可以有以下两种不同类型的定义:
1点向量——向量仅由它的长度和方向确定,与它的终点位置无关。依据此定义,不管向量的终点位于何处,任意两个长度和符号相同的平行向量相等。为了表示这种类型的向量,通常把终点放置在参考系的原点并用箭头指出方向,坐标值的增加量就构成了点向量。
2线向量——向量不仅由它的长度和方向确定,也取决于它的位置。因此,两个不同直线的平行向量,即使有相同长度和符号也被认为是不相等的向量。直观地看,为了准确定义这种线向量,
图2-1长度相同的两个平行向量
必须定义两个独立的点向量,其中一个定义它的长度和方向,另一个确定它的终点位置或者所在直线的“矩”。也就是说,线向量在三维空间应该具有6个分量。一个典型且有效的线向量的数学描述方法就是所谓的对偶代数[1],将在本章后面介绍。
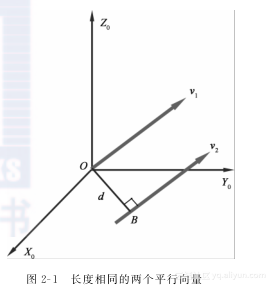
图2-1表示了两个长度和方向相同的平行向量v1和v2。在点向量定义下v1=v2,而如果把这两个向量当作线向量,由于它们之间存在非零距离d,v1≠v2。除非特别指出是线向量,否则默认情况下的向量指的是点向量。例如,在后面的机器人和数字人建模分析及应用中,为了唯一确定机器人
15
连杆坐标系相对于基座的轴线,必须定义两个点向量:一个三维单位向量确定它的方向,另一个三维位置向量确定连杆坐标系原点相对于基坐标系的位置。
通常用3×1列向量表示三维向量(默认是点向量)。两个向量之间的数学运算包括加法、减法和乘法。向量乘法有两种不同类型:点积(内积)和叉积(向量积)
