本节书摘来自华章社区《机器人与数字人:基于MATLAB的建模与控制》一书中的第1章,第1.1节机器人的发展历程: 过去、现在和未来,作者[美]顾友谅(Edward Y.L.Gu),更多章节内容可以访问云栖社区“华章社区”公众号查看
第1章
A Journey from Robot to Digital Human: Mathematical Principles and Applications with MATLAB Programming
机器人和数字人建模概述
1.1机器人的发展历程: 过去、现在和未来
近半个世纪以来,机器人研究和技术开发不断发展进步。机器人的发展历史主要分为三个时期:早期、中期和近期。美国机器人协会早期对机器人的官方定义为:
“机器人是一种用于移动各种材料、零件、工具或专用装置的,通过程序动作来执行各种任务的可编程多功能操作机。”
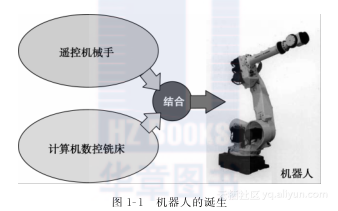
与过去这种从专业角度的定义不同,现在通常认为机器人是一种在物理结构、智能甚至个性方面模仿人类的可控系统。在早期,人们经常通过所谓的遥控机械手远程搬运材料或在工业应用中做一些简单的任务。不久,遥控机械手和计算机数控(CNC)铣床“共结连理”并“孕育”出了机器人,如图11所示。
此后,机器人在工业和科研实验室中逐渐流行。在机器人早期发展历程中,按时间前后排序的重大事件如下:
1947——研制了第一台伺服电动遥控机械手;
1948——研制了力反馈遥控机械手;
1949——开始研究数控铣床;
1954——乔治·德沃尔设计了第一台可编程机器人;
1956——约瑟夫·恩格伯格(英)购买了尤尼梅申公司并生产尤尼梅特机器人;
1961——第一台尤尼梅特机器人投入通用汽车公司工厂使用,用于压模铸造;
1
1961——研制了第一台力反馈机器人;
1963——研制了第一套机器人视觉系统;
1971——斯坦福大学研制了斯坦福机械手臂;
1973——斯坦福大学开发了第一套机器人编程语言(WAVE);
1974——辛辛那提·米拉克隆公司推出计算机控制的T3机器人;
1975——尤尼梅申公司登记了它的首次财务收益;
1976——德雷珀实验室研制了RCC(远距离中心柔顺装置)用于零件装配;
1978——在美国通用汽车公司研究的基础上,尤尼梅申公司推出PUMA机器人;
1979——日本推出SCARA机器人;
1981——卡内基梅隆大学研制了第一台直接驱动机器人。
这些历史性和革命性的事件是令人难忘的,几乎每一本机器人教科书都认可并记录了工业机器人早期发展的辉煌年代[1, 2, 3]。经过了机器人早期发展之后,从1982年到1996年是机器人中期发展时代,各种新型的机器人系统及其运动学、动力学和控制算法被发明并广泛应用,而且增长速度几乎是指数级的。机器人研究的重要发现和成果可以通过以下典型方面来概括:
牛顿欧拉逆动力学算法;
冗余机器人及其应用的广泛研究;
多机器人协调系统和机器人群组全局控制的研究;
具有柔性连杆或柔性关节机器人的控制;
欠驱动和浮动基机器人系统研究;
2
并联机器人和串联机器人研究;
机器人系统智能控制和学习控制;
高级力控制算法和传感装置的开发;
机器人系统中基于传感器的控制和传感器融合;
机器人实时视觉和模式识别;
步行、跳跃、移动、攀爬机器人的开发;
超冗余机器人(蛇形)及应用研究;
多操作臂机器人、可重构机器人以及机器人灵巧手;
机器人集群的有线和无线网络通信的远程控制;
具有传感器网络的移动机器人及野外机器人;
机器人系统的数字逼真模拟和动画;
仿生机器人和微型/纳米机器人研究;
类人机器人研究和开发;
安卓机器人的开发和智能控制,等等。
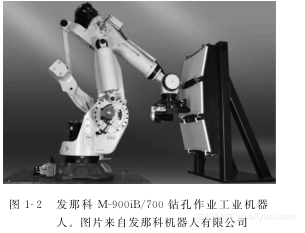
1996年之后,机器人的研究进入成熟期。相对于早期时代,近期机器人的应用取得了飞速发展,机器人技术的应用不断从工业快速扩展到许多不同领域,如军事、空间探索、地下和水下操作、医疗手术以及个人服务和国土安全。近几十年来,为了满足各种各样应用的挑战,机器人系统设计和控制已经进一步发展到新的高度,其具体表现在结构的柔性、灵巧性、可控性、可重构性、可扩展性、可操作性、控制精度、环境适应性以及智能程度[4.8]。在大量互联网网站报道中,人们可以看到这种快速且不断发展的强劲势头。图12展示了发那科新研发的一台M900iB/700超级重型工业机器人,它能够提供700kg额定载重量,具有内置iRVision视觉和力觉集成系统。
与机器人的研究和技术开发并行的虚拟机器人仿真研究也有着悠久的探索历程。在20世纪80年代中期,直到今天一直以达索Delmia闻名于世的Deneb机器人公司,公布了他们早期版本的机器人图形仿真软件包IGRIP。与此同时,西门子Technomatix(目前的TechnomatixUGS)推出了ROBOCAD产品,拉开了竞争的序幕。虽然大多数机器人模拟软件能给用户带来丰富多彩的3D可视化和逼真的感受,但由于参数的不稳定性,其内部仿真算法不能精确地预测到达位置和周期时间。因此,为了提高预测的准确性,软件公司和机器人制造商共同努力创建了一个机器人仿真的规范(RRS)。
3
在20世纪90年代中期,机器人仿真技术走向成熟。机器人仿真的能力也被应用到产品生命周期管理(PLM)[13, 14]中。机器人手臂、固定装置以及工作单元的图像仿真研究不仅规模越来越大,还具有更强的能力,可以管理从概念设计到样机研究,再到生产的产品设计和制造工艺。如今,机器人仿真技术已经进一步发展到更加复杂、综合的新阶段。它已经变成设计团队和顾客沟通设计问题的通用语言,也是产品和过程设计工程师、管理者和研究者们用来验证和证实他们的新概念和新发现的不可或缺的工具。
机器人研究的新趋势如下:在当今和未来机器人技术的发展和应用中,在机械方面可能会发展得更快、更有柔性、更灵巧,在智能方面会发展得更强大。由于机器人在工业和专门领域的应用,以及社会和个人服务方面潜在的巨大市场和社会需求,机器人系统的设计、性能以及工艺已经跨越到一个全新转型时期。面临着转型时期激烈的竞争和挑战,机器人研究绝不会落后。相反,机器人研究具有强劲的发展势头,它将快速地向前发展并且创造出更好的解决方案,在未来几年创造出更多创新成果,获得新的发现来加快机器
人的发展。
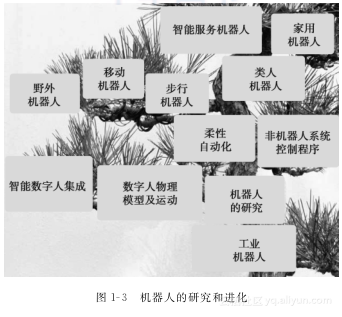
图1.3描述了机器人研究和机器人系统进化树。早期时代,树的主干是创新和不断发展的工业机器人。机器人的研究源于工业机器人的开发,工业机器人的开发激发了机器人研究的积极性,机器人的研究也受到工业机器人开发的挑战,树干分支前机器人的研究发展到树干的顶端。随着机器人研究的迅速增长和逐渐成熟,它变得更有能力创造新型的机器人系统,并且推动新的研究分支萌芽和成长。除了生产和开发各种各样的服务机器人,随着机器人系统建模方法和控制理论的发展,孕育了一些新的研究和应用分支。数字化人体建模及应用就是其中的典型。其他的还包括非机器人系统动力学建模和控制策略设计,如军用车辆的炮塔控制系统、直升机和直升机甲板以及球木板控制系统,这些将在第8章中讨论。
4~5
大量新型服务机器人和类人机器人正在占据如今的机器人舞台,而工业机器人技术的发展速度也从未放缓。相反,它们获得更多动力来不断创新新
型机器人模型和系统,以此提高其柔性和自动化,更好地服务于制造和生产线。过去是由单机器人手臂操作作业,如今是双机器人或者机器人群组协调自动化操作作业。最近应用的典型案例是自动化汽车“白车身”装配站,通过基于PLC的以太网/无线通信全局控制20多台工业机器人组焊接和制造汽车车身。
其中最引人注目的,也是最值得庆祝的成就是类人机器人的发展,它构成了各种服务机器人和家用机器人的基础。类人机器人的发展历史甚至早于工业机器人[15]。1495年,意大利数学家、工程师列奥纳多·达·芬奇设计了神似装甲骑士的机器人,它被称为达·芬奇机器人。1973年,日本东京早稻田大学设计了更具有时代感的类人机器人Wabot1。Wabot1机器人能够行走,能用人造嘴巴和人进行日语对话,也能用外部接收器(如人造耳朵和眼睛)来测定目标的距离和方向。十年之后,他们又推出了一款新型音乐类人机器人Wabot2,它能够与人对话,用眼睛看懂乐谱并在电子琴上演奏一般难度的曲子。1986年以来,本田研发了从E0(实验机型0)到E6的七款双足机器人。1986年研发了E0,1987~1991年研发了E1~E3,1987~1993年研发了E4~E6。之后,本田在双足机器人基础上加入了上肢,推出P1(原型机1)~P3机型作为E系列的升级机型。2000年,本田完成了第11款双足类人机器人的研发,被称为阿西莫机器人,它不仅可以行走,而且还能跑步。
从那以后,许多公司和研究机构连续推出了多款类人机器人模型。2003年,日本大阪大学和Kokoro公司联合研制了一款称为Actroid的类人机器人,它用硅胶“皮肤”覆盖整个机器人,看起来酷似真人。两年以后,日本大阪大学和Kokoro公司在东京研制了一款新系列的超现实类人机器人。这个系列的原始机型是Geminoid HI1,随后研制了GeminoidF(2010年研制)以及GeminoidDK(2011年研制)。
值得一提的是,在2006年,美国宇航局和通用汽车公司合作开发了一款非常先进的类人机器人——Robonaut 2。它最初的设计目的是协助宇航员在航天飞机或太空站进行科学实验。因此,Robonaut 2类人机器人没有腿部,仅有上半身,以便利用它灵巧的手部和手臂在失重环境下完成高难度动作 [16,17]。
几乎每年在世界范围内都报道了大量新型类人机器人。虽然提高智能程度和实现逼真的动态运动仍然是类人机器人研究和发展的两个主要瓶颈,但其外观和运动速度已经取得了革命性的突破,迈上了一个新的高度。我们非常乐观地认为,智能类人机器人可能会比预期更早地变成现实。真正的智能家居机器人将能
6
够帮助人们做日常家务事、招待客人,甚至能够取代台式机或者便携式计算机做计算和文档工作。然而,为了实现这个目标,仅做技术开发工作是不够的。相反,还必须依靠更多的在理论发展和基础研究方面的新发现和新方案来克服每一个具有挑战性的障碍。
作为机器人基础研究近况的总结,有许多课题仍在开展:
1欠驱动机器人或非完整约束机器人系统的自适应控制;
2柔性关节或柔性连杆机器人的动力学控制;
3开链串联机器人和闭链并联机器人两者之间的对偶关系;
4实时影像处理和智能模式识别;
5机器人学习和智能控制的稳定性;
6机器人对复杂环境的交互和适应性;
7机器人和环境之间闭环反馈的感知性能;
8机器人物理运动的认知互动;
9机器人动力学控制和人机交互的更多开放性课题。
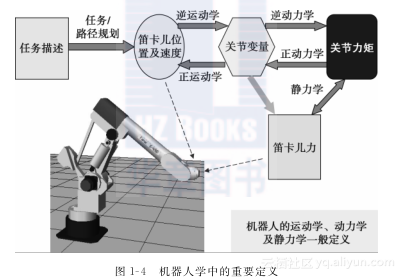
总之,本书的机器人分析部分是为了激励和鼓励读者接受所有新的挑战,并对当前和未来的机器人研究以及系统设计和应用尽最大的努力。本书机器人学部分将涵盖并主要集中于三大基本问题:运动学、动力学、控制以及相关的MATLAB编程问题。具体地,图14给出了上述内容在机器人学中的定义。本书不讨论机器人的力控制、机器人学习和智能控制、机器人视觉和识别、传感反馈控制,以及基于可编程控制器和人机交互(HMI)的机器人集群的网络化控制。读者可以参考相关文献或技术文件来了解这些面向应用的主题。