本节书摘来自异步社区《玩转3D打印》一书中的第2章,第2.3节3D扫描仪构建3D模型,作者 王春玉 , 傅浩 , 于泓阳,更多章节内容可以访问云栖社区“异步社区”公众号查看
2.3 3D扫描仪构建3D模型
玩转3D打印
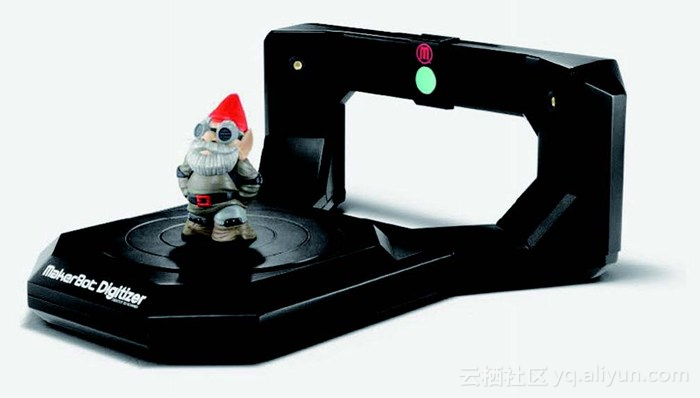
基于3D扫描仪构建3D模型的方法主要是利用3D扫描仪等设备,来构建所需模型。通过对物体的3D扫描,获得物体表面每个采样点的3D空间坐标以及色彩信息,最终生成3D模型。其特点在于模型精度较高,一般适用于文物复原、工业生产等。缺点,对于物体表面的纹理特征多数仍然需要辅助大量的手工工作才能完成,且设备操作复杂,价格昂贵。美国3D打印机厂商MakerBot在2013年South by Southwest(西南偏南大会,SXSW)互动大会上展示了3D扫描仪的原型产品MakerBot Digitizer,如图2-35所示,该型产品售价1400美元,在MakerBot官网(www.makerbot.com)可以订购。