本节书摘来自异步社区《人脸识别原理及算法——动态人脸识别系统研究》一书中的1章1.3节模式识别理论,作者 沈理 , 刘翼光 , 熊志勇,更多章节内容可以访问云栖社区“异步社区”公众号查看。
1.3 模式识别理论
人脸识别原理及算法——动态人脸识别系统研究
模式识别是将计算机表示出来的图像和已知的类别进行匹配的过程。识别过程将计算机视觉中表现的客观物体用一定的方法从特征空间映射到模型空间。
模式识别在人类的活动中普遍存在。模式的一种经典定义为[17]:混沌世界中与无序相对的一种状态就是模式。模式识别过程就是试图去确定样本的类别属性,即把某一样本归属于确定类型中的一类[18, 19]。在模式识别过程中,最重要的是寻找样本的特征空间,通过样本特征空间来确定样本的归类,因此可以认为模式识别过程是由模式空间经过特征空间到类型空间的映射过程。在模式识别过程中,模式维数是无限多的,这意味着模式识别中物理世界观察的数据集合具有多样性。模式识别中任一模式空间的属性表示为特征空间的必要条件是客观世界里的物体和时间在物理上是可测量的,而这些可测量的数据都能够用函数的形式描述;并且这些数据可以归并到一组模式定义上。在从模式空间到特征空间的变化中,经常由于模式空间的维数太大,将模式空间的维数进行压缩和综合分析得到低维的特征空间,这一过程称为特征提取或特征选择。模式识别过程的特征空间到类型空间还存在一定的映射关系,这个映射关系一般采用既有的经验和知识对特征空间参数进行分类,这一分类过程叫作判断决策,而判断决策中使用的知识和经验叫作判断规则。在适当的判断规则下,特征空间里的样本区分成不同的类型,这样将特征空间区分成不同的类型空间。类型空间中不同类型的分界面称为决策面。类型空间的维数定义为类型数目,而不是模式空间的维数。模式识别过程存在一个降维的过程,因此一般说来特征空间的维数要大于类型空间的维数,而模式空间的维数要大于特征空间的维数。整个模式识别过程是从可感知的世界通过模式空间、特征空间,经历模式采集、特征提取和分类判决过程,最后得到分类的结果,如图1-2所示。
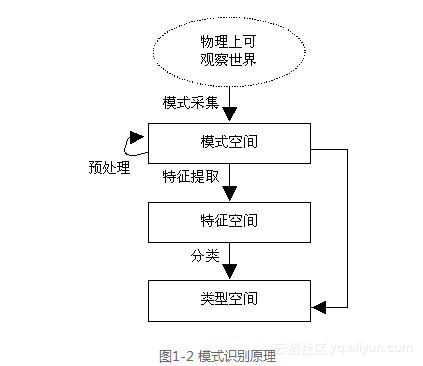
下面将模式识别整体过程分为预处理、特征提取、分类过程等几个步骤分别进行描述[20]。
1.3.1 预处理
预处理是模式识别过程的第一步。预处理是将模式识别的样本从一定的环境中抽取出不受更多干扰因素影响的待识别样本。一般说来,预处理的功能包括消除或者减少模式采集中的噪声及其他干扰,以便提高信噪比、清除或减少数据图像模糊(特别是运动模糊)及几何失真,提高清晰度、改变模式的结构。例如将非线性的模式转变成线性的模式、图像的滤波、变换、编码、标准化等都可以归类于预处理工作。在一些采样过程中,采集到的是一些模拟量,这一过程在工业控制中经常出现,而计算机却只能处理数字量,这就要求进行模/数转换。对于模/数转换一般要考虑两个量:采样时间间隔和量化级。采样和量化对于模/数转换的效果影响特别大。特别应该指出的是,没有一个通用标准来规定图像模式量化过程和预处理的效果,这种效果是根据客观观察决定的。总之,预处理过程基本包括了模式识别前的所有工作。
1.3.2 特征提取
在客观物体的样本采集过程中,为了保证模式的真实性,总是尽量多地采集各项数据,这使得样本在模式空间里的维数很大。维数大的模式空间带来的处理时间和费用都很大,而且过多的维数影响了分类的可能。另外在模式区分时,并不是每一个特征对事物的描述都有相同意义,特别指出:对于不同的分类要求,不同的特征有不同的意义。特征提取是将对模式识别有明显作用的特征提取出来,通过这一过程可以压缩模式的维数,使之便于处理,减少损失。
特征提取后得到的特征空间是为了分类使用的,对于相同的物体在不同的分类规则下,所提取的特征必须满足在某种准则下分类错误最小。在一般情况下,可以选择适当的正交变换,考虑特征之间的统计关系,提取出最有效的特征;在特征提取的同时删除贡献微弱的特征,以达到减少分类错误的目的。
1.3.3 分类
分类将特征空间划分为类型空间,同时分类还将未知类别属性的样本确定为类型空间里的某一个类型。在给定的条件下,分类还可以否定样本属于某种类型。在实际的模式识别过程中,在预先给定的条件下,被考虑的类型属性通常具有相似性,因此在分类中出现错误是不可避免的。分类过程只能以某种错误率来完成。对于好的模式识别算法,在特征空间上必然有好的分类算法来减少分类的错误率。而且特征空间充分地反映模式空间的程度也决定了分类的错误率。因此错误率的降低是模式识别研究的中心问题。
上面介绍了模式识别的基本原理。模式识别的识别过程是依照上面的过程进行的。另外模式识别系统必然需要一个学习的过程,通过样本特征的变化来对分类功能自动调节,这一功能可以认为是分类器的训练。随着样本的变化,系统自动调整分类特性,这一过程在模式识别系统中属于前期工作,称为学习过程。图1-3为模式识别系统框图。
模式采集完成模式的采集。根据处理对象的不同可以选用各种传感器、测量装置或图像录取输入装置。在采集过程中或采集之后,经常需要进行模/数转换、滤波、消除模糊、减小噪声、纠正几何失真等预处理操作。特征提取实现由模式空间向特征空间的转变,有效地压缩模式维数。在一般情况下,特征提取的组合是在一定分类准则下找出最佳的或者接近最佳的变换器,或者是为了实现某种特征的选择算法。
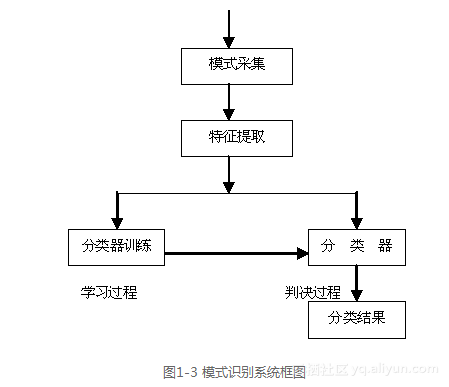
分类器必须实现对未知类别属性样本的分类判决,因此设计分类器首先必须确定对分类错误率的要求,选用适当的判决规则。为了能使分类器有效地进行分类判决,还必须首先对分类器进行训练,这就是分类器的学习过程。分类器的学习/训练过程是模式识别中的重要概念。模式识别具有自动识别功能是非常重要和关键的。经过机器学习过程后,分类器可以得到一个分类器样本原型,这一过程必须经过多次重复,不断纠正错误,最后才能使分类的错误率达到要求。经过特征提取和训练/学习过程的样本通常叫作训练样本,这些样本的类别属性预先并不都是知道的。分类判决常常是样本多特征的函数,学习过程就是要确定函数的所有因子,甚至直接确定判决规则。开始时输入一些训练样本,分类错误率一定很大,因此就要修正判决规则或者权因子。不断输入修正的一个正反馈过程直到分类错误率低于某个定值为止,这个过程称为完整的学习过程。
按分类特性划分,模式识别的常用方法主要包括统计模式识别和句法模式识别。统计模式识别是以实验样本在特征空间中的概率密度函数为基础的。而句法模式识别是以图形的结构特征为基础,采用形式语言理论的技术,适合于复杂景物图像分析和理解。多数识别采用统计方法。
本文仅用于学习和交流目的,不代表异步社区观点。非商业转载请注明作译者、出处,并保留本文的原始链接。



