本节书摘来异步社区《单片机串口通信及测控应用实战详解》一书中的第6章,第6.2节,作者:李江全,聂晶,梁习卉子,刘新英,更多章节内容可以访问云栖社区“异步社区”公众号查看
6.2 单片机端程序设计
单片机串口通信及测控应用实战详解
6.2.1 使用查询方式C51程序设计
串口在发送数据和接收数据完成时均会引起串口中断,从而使接收标志位RI和发送标志位TI置1。查询方式和中断方式的区别就在于CPU查看RI和TI方式不同,以及处理数据的效率不同。
查询方式是指通过CPU定时的查询SCON串口控制寄存器中的接收标志位RI和发送标志位TI来接收和发送数据。此种方式下,当串口发送数据或接收数据完成时,仅仅将相应的标志位置1而不会以任何形式通知主程序。主程序只能通过定时查询发现标志位状态的改变,从而进行相应的处理,如标志位的清0。这种方式下数据的发送和接收是半双工的,占用CPU时间长,工作效率低。
中断方式是在接收和发送数据时,CPU不必连续地查询接收标志位RI和发送标志位TI。当串口发送数据或接收数据完成时,CPU自动转入中断服务程序对接收到的数据进行处理,只需要在中断服务程序中通过查看是RI还是TI来判断数据是接收还是发送,从而跳转至相应的处理部分。这种方式下可以实现全双工通信,CPU可以腾出时间处理其他任务,效率高,速度快。
查询方式通信流程:当串口接收到数据时,硬件系统将RI置1。在主程序中当CPU首次查询到RI = 1时,首先判断接收的首字节是否为本机地址,如果不是则将接收缓冲区里的数据清0返回重新查询接收;如果是则驱动继电器动作、通过数码管显示数据和地址,并将数据返回给上位机;然后继续下一次循环。
各个单片机开发板C51程序基本相同,只是地址不同,在常量声明“#define”语句中体现。
#include<reg51.h>
#include<string.h>
#define addr 01 //02号单片机板C51程序addr为02;03号单片机板C51程序addr为03
#define uint unsigned int
#define uchar unsigned char
sbit jdq1 = P2^0; //继电器1
sbit jdq2 = P2^1; //继电器2
/**********************数码显示 键盘接口定义**********************/
sbit PS0 = P2^4; //数码管个位
sbit PS1 = P2^5; //数码管十位
sbit PS2 = P2^6;//数码管百位
sbit PS3 = P2^7;//数码管千位
sfr P_data = 0x80;//P0口为显示数据输出口
sbit P_K_L = P2^2;//键盘列
//字段转换表
uchar tab[] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6,
0xee,0x3e,0x,0x,0x9e,0x8e};
uchar data_buf[2];
void init_serial(void);
bit recv_data(void);
void display(uchar a,uchar c);
void sw_out(unsigned char b);//开关量输出
void delay(unsigned int delay_time);
void main(void)
{ uint a;
init_serial();
EA = 0;
while(1)
{
if(recv_data() == 0)
{ data_buf[0] = 0;
data_buf[1] = 0;
continue;
}
sw_out(data_buf[1]);
TI = 0;
SBUF = data_buf[0];
while(!TI);
TI = 0;
TI = 0;
SBUF = data_buf[1];
while(!TI);
TI = 0;
for(a = 0;a<200;a++)//显示,兼有延时的作用
display(data_buf[1],data_buf[0]);
}
}
/**************************串口初始化函数**************************/
/*函数原型:void init_serial(void)
/*函数功能:设置串口通信参数及方式
/******************************************************************/
void init_serial(void)
{ TMOD = 0X20;//定时器1方式2
TH1 = 0XFA;
TL1 = 0XFA;
PCON = 0X80;
SCON = 0X50;//串口方式1,允许接收,波特率9600bit/s
TR1 = 1; //开始计时
}
/**************************数据接收函数**************************/
/*函数原型:void recv_data(uint temp)
/*函数功能:数据发送
/*输入参数:temp
/******************************************************************/
bit recv_data(void)
{ uchar c0 = 0;
uchar tmp,i = 0;
while(c0<2)
{ RI = 0;
while(!RI);
tmp = SBUF;
RI = 0;
data_buf[i] = tmp;
i++;
c0++;
}
if(data_buf[0]! = addr)
return 0;
return 1;
}
/**************************数码管显示函数**************************/
/*函数原型:void display(void)
/*函数功能:数码管显示
/*调用模块:delay()
/******************************************************************/
void display(uchar a,uchar c)
{
bit b = P_K_L;
P_K_L = 1;//防止按键干扰显示
P_data = tab[a&0x0f]; //显示数据一位
PS0 = 0;
PS1 = 1;
PS2 = 1;
PS3 = 1;
delay(200);
P_data = tab[(a>>4)&0x0f]; //显示数据十位
PS0 = 1;
PS1 = 0;
delay(200);
P_data = tab[c]; //显示地址一位
PS1 = 1;
PS2 = 0;
delay(200);
P_data = tab[0]; //显示地址十位
PS2 = 1;
PS3 = 0;
delay(200);
PS3 = 1;
P_K_L = b; //恢复按键
P_data = 0xff; //恢复数据口
}
/**************************数据输出函数**************************/
/*函数原型:void sw_out(uchar a)
/*函数功能:数据采集
/******************************************************************/
void sw_out(unsigned char b)
{
if(b = = 0x00)
{
jdq1 = 1; //接收到PC发来的数据00,关闭继电器1和2
jdq2 = 1;
}
else if(b == 0x01)
{
jdq1 = 1; //接收到PC发来的数据01,继电器1关闭,继电器2打开
jdq2 = 0;
}
else if(b == 0x10)
{
jdq1 = 0; //接收到PC发来的数据10,继电器1打开,继电器2关闭
jdq2 = 1;
}
else if(b == 0x11)
{
jdq1 = 0; //接收到PC发来的数据11,打开继电器1和2
jdq2 = 0;
}
}
/*******************************延时函数*********************************/
/*函数原型:delay(unsigned int delay_time)
/*输入参数:delay_time (输入要延时的时间)
/**********************************************************************/
void delay(unsigned int delay_time) //延时子程序
{for(;delay_time>0;delay_time--)
{}
}```
将C51程序编译生成HEX文件,然后采用STC-ISP软件将HEX文件下载到单片机中。
打开“串口调试助手”程序(ScomAssistant.exe),首先设置串口号COM1、波特率9600、校验位NONE、数据位8、停止位1等参数(注意:设置的参数必须与单片机设置的一致),选择“十六进制显示”和“十六进制发送”,打开串口。
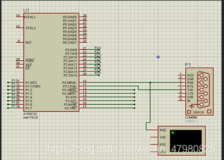
PC通过串行口将十六进制数发送给多个单片机,驱动地址吻合的单片机继电器动作,并在数码管显示接收的数。单片机接收到数据后,返回原数据给PC。
如PC发送十六进制数据“01 11”,驱动1号单片机板继电器1和2打开,单片机返回十六进制数据“01 11”。如图6-2所示。
<div style="text-align: center"><img src="https://yqfile.alicdn.com/b8dbd20ad7d234d32df65033fcf7e4bc0e155ce6.png" width="" height="">
</div>
####6.2.2 使用查询方式汇编程序设计
各个单片机开发板汇编程序基本相同,只是地址不同。/**
** 1号从机机程序(单片机与多个单片机串口通信)
** 晶 振 频 率:11.0592MHz
** 线 路:单片机实验开发板B
**/
A_BYTE EQU 40H
B_BYTE EQU 41H
C_BYTE EQU 42H
D_BYTE EQU 43H
MCU_DATA EQU 45H
MCU_ADDR EQU 01H
PS0 BIT P2.4 //数码管个位
PS1 BIT P2.5 //数码管十位 PS2 BIT P2.6 //数码管百位
PS3 BIT P2.7 //数码管千位
jdq1 BIT P2.0 //继电器1
jdq2 BIT P2.1 //继电器2
ORG 0000H
SJMP MAIN
ORG 0030HMAIN:MOV SP,#60H
ACALL init_serialLOOP:CLR RI
JNB RI,$ MOV A,SBUF
CLR RI
CJNE A,#MCU_ADDR,LOOP
JNB RI,$ //是本机地址 MOV MCU_DATA,SBUF
CLR RI
CLR TI
MOV SBUF,#MCU_ADDR
JNB TI,$
CLR TI
MOV SBUF,MCU_DATA
JNB TI,$
CLR TI
MOV A,MCU_DATA SWAP A
ANL A,#0FH
MOV B_BYTE,A
MOV A,MCU_DATA
ANL A,#0FH
MOV A_BYTE,A
ACALL SW_OUT
MOV C_BYTE,#MCU_ADDR
MOV D_BYTE,#0H
MOV R3,#10H RR1:ACALL DISPLAY
DJNZ R3,RR1
SJMP LOOPSW_OUT:MOV A,MCU_DATA //数据输出
CJNE A,#00H,SS1 SETB jdq1 //接收到PC发来的数据00,关闭继电器1和2
SETB jdq2
SJMP SS0
SS1:CJNE A,#01H,SS2
SETB jdq1 //接收到PC发来的数据01,继电器1关闭,继电器2打开 CLR jdq2
SJMP SS0
SS2:CJNE A,#10H,SS3
CLR jdq1 //接收到PC发来的数据10,继电器1打开,继电器2关闭
SETB jdq2
SJMP SS0
SS3:CJNE A,#11H,SS0
CLR jdq1 //接收到PC发来的数据11,打开继电器1和2
CLR jdq2
SS0:RET
init_serial: //串口初始化函数
MOV SCON,#50H ;设置成串口1方式
MOV TMOD,#20H ;波特率发生器T1工作在模式2上
MOV TH1,#0FAH ;预置初值(按照波特率4800bit/s预置初值)
MOV TL1,#0FAH ;预置初值(按照波特率4800bit/s预置初值)
ORL PCON, #80H;波特率加倍 现在的波特率为9600bit/s
SETB TR1 ;启动定时器T1 RET
DISPLAY: MOV A,R0
PUSH ACC
MOV DPTR,#NUMTAB ;指定查表起始地址
MOV R0,#4DPL1: MOV R1,#25 ;显示1000次
DPLOP: MOV A,A_BYTE ;取个位数
MOVC A,@A+DPTR ;查个位数的7段代码
MOV P0,a ;送出个位的7段代码
CLR PS0 SETB PS1
ACALL D1MS ;显示1ms
MOV A,B_BYTE ;取十位数
MOVC A,@A+DPTR ;查十位数的7段代码
MOV P0,A ;送出十位的7段代码
SETB PS0 CLR PS1
ACALL D1MS ;显示1ms
MOV A,C_BYTE ;取百位数
MOVC A,@A+DPTR ;查百位数的7段代码
MOV P0,A ;送出百位的7段代码
SETB PS1 CLR PS2
ACALL D1MS ;显示1ms
MOV A,D_BYTE ;取千位数
MOVC A,@A+DPTR ;查千位数的7段代码
MOV P0,A ;送出千位的7段代码
SETB PS2 CLR PS3
ACALL D1MS ;显示1ms
SETB PS3
DJNZ R1,DPLOP ;100次没完循环
DJNZ R0,DPL1 ;4个100次没完循环 POP ACC
MOV R0,A
RETD1MS: MOV R7,#80 ;1ms延时
DJNZ R7,$
RET;实验板上的7段数码管0~9数字的共阴显示代码
numtab: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H,0FEH,0F6H
END```将汇编程序编译生成HEX文件,然后采用STC-ISP软件将HEX文件下载到单片机中。
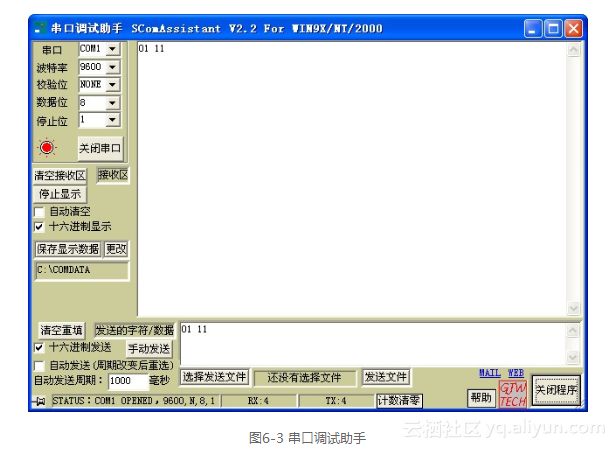
打开“串口调试助手”程序(ScomAssistant.exe),首先设置串口号COM1、波特率9600、校验位NONE、数据位8、停止位1等参数(注意:设置的参数必须与单片机设置的一致),选择“十六进制显示”和“十六进制发送”,打开串口。
PC通过串行口将十六进制数发送给多个单片机,驱动地址吻合的单片机继电器动作,并在数码管显示接收的数。单片机接收到数据后,返回原数据给PC。
如PC发送十六进制数据“01 11”,驱动1号单片机板继电器1和2打开,单片机返回十六进制数据“01 11”,如图6-3所示。
6.2.3 使用中断方式C51程序设计
中断方式通信流程:当串口接收到数据时,硬件系统将RI置1,触发程序进入中断服务程序。由中断服务程序接收串口数据并将其保存至接收缓冲区。中断服务程序首先判断接收的首字节是否为本机地址,如果不是则清空接收缓冲区,计数变量清0,直接退出中断服务程序从新等待数据接收;否则继续接收数据,计数变量C0加1。当接收完数据后,计数变量清0以便于下一次数据的接收,驱动继电器动作并将数据返回给上位机。然后退出中断服务程序,在主程序中通过数码管显示缓冲区的内容。
各个单片机开发板C51程序基本相同,只是地址不同,在常量声明“#define”语句中体现。
#include<reg51.h>
#include<string.h>
#define addr 01 //02号单片机板C51程序addr为02;03号单片机板C51程序addr为03
#define uint unsigned int
#define uchar unsigned char
sbit jdq1 = P2^0;//继电器1
sbit jdq2 = P2^1;//继电器2
/***********************数码显示 键盘接口定义********************/
sbit PS0 = P2^4;//数码管个位
sbit PS1 = P2^5;//数码管十位
sbit PS2 = P2^6;//数码管百位
sbit PS3 = P2^7;//数码管千位
sfr P_data = 0x80;//P0口为显示数据输出口
sbit P_K_L = P2^2;//键盘列
uchar tab[] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,
0xfe,0xf6,0xee,0x3e,0x,0x,0x9e,0x8e};//字段转换表
uchar data_buf[2];
void init_serial(void);
void display(uchar a,uchar c);
void sw_out(unsigned char b);//开关量输出
void delay(unsigned int delay_time);
void main(void)
{ uint a;
init_serial();
RI = 0;
while(1)
{ for(a = 0;a<200;a++)//显示,兼有延时的作用
display(data_buf[1],addr);
}
}
/**************************串口初始化函数**************************/
/*函数原型:void init_serial(void)
/*函数功能:设置串口通信参数及方式
/******************************************************************/
void init_serial(void)
{ TMOD = 0X20;//定时器1方式2
TH1 = 0XFA;
TL1 = 0XFA;
PCON = 0X80;
SCON = 0X50;//串口方式1,允许接收,波特率9600bit/s
TR1 = 1; //开始计时
ES = 1;
EA = 1;
}
//串口中断处理函数
void serial_int() interrupt 4
{ uchar c0,i;
if(RI == 1)
{ data_buf[i] = SBUF;
RI = 0;
i++;
c0++;
if(data_buf[0]! = addr)
{ data_buf[0] = 0;
data_buf[1] = 0;
c0 = 0;
i = 0;
return;
}
if( c0 == 2)
{ c0 = 0;
sw_out(data_buf[1]);
TI = 0;
SBUF = data_buf[0];
while(!TI);
TI = 0;
TI = 0;
SBUF = data_buf[1];
while(!TI);
TI = 0;
i = 0;
}
}
}
/**************************数码管显示函数**************************/
/*函数原型:void display(void)
/*函数功能:数码管显示
/*调用模块:delay()
/******************************************************************/
void display(uchar a,uchar c)
{
bit b = P_K_L;
P_K_L = 1;//防止按键干扰显示
P_data = tab[a&0x0f];//显示数据一位
PS0 = 0;
PS1 = 1;
PS2 = 1;
PS3 = 1;
delay(200);
P_data = tab[(a>>4)&0x0f]; //显示数据十位
PS0 = 1;
PS1 = 0;
delay(200);
P_data = tab[c];//显示地址一位
PS1 = 1;
PS2 = 0;
delay(200);
P_data = tab[0];//显示地址十位
PS2 = 1;
PS3 = 0;
delay(200);
PS3 = 1;
P_K_L = b;//恢复按键
P_data = 0xff;//恢复数据口
}
/**************************数据输出函数**************************/
/*函数原型:void sw_out(uchar a)
/*函数功能:数据采集
/******************************************************************/
void sw_out(unsigned char b)
{
if(b = = 0x00)
{
jdq1 = 1; //接收到发来的数据00,关闭继电器1和2
jdq2 = 1;
}
else if(b = = 0x01)
{
jdq1 = 1; //接收到发来的数据01,继电器1关闭,继电器2打开
jdq2 = 0;
}
else if(b = = 0x10)
{
jdq1 = 0; //接收到发来的数据10,继电器1打开,继电器2关闭
jdq2 = 1;
}
else if(b = = 0x11)
{
jdq1 = 0; //接收到发来的数据11,打开继电器1和2
jdq2 = 0;
}
}
/*******************************延时函数*********************************/
/*函数原型:delay(unsigned int delay_time)
/*函数功能:延时函数
/*输入参数:delay_time (输入要延时的时间)
/**********************************************************************/
void delay(unsigned int delay_time) //延时子程序
{for(;delay_time>0;delay_time--)
{}
}```
####6.2.4 使用中断方式汇编程序设计
各个单片机开发板汇编程序基本相同,只是地址不同。/**
** 1号从机机程序(多个单片机与PC串口通信)
** 晶 振 频 率:11.0592MHz
** 线 路:单片机实验开发板B
**/
A_BYTE EQU 40H
B_BYTE EQU 41H
C_BYTE EQU 42H
D_BYTE EQU 43H
RECV_NUM EQU 44H
MCU_DATA EQU 45H
MCU_ADDR EQU 01H
PS0 BIT P2.4 //数码管个位
PS1 BIT P2.5 //数码管十位 PS2 BIT P2.6 //数码管百位
PS3 BIT P2.7 //数码管千位
jdq1 BIT P2.0 //继电器1
jdq2 BIT P2.1 //继电器2
ORG 0000H
SJMP ORG 0023H
AJMP UART
ORG 0030HMAIN:MOV SP,#60H
MOV RECV_NUM,#0
ACALL init_serialLOOP:MOV A,MCU_DATA
SWAP A
ANL A,#0FH
MOV B_BYTE,A
MOV A,MCU_DATA
ANL A,#0FH
MOV A_BYTE,A
ACALL SW_OUT
MOV C_BYTE,#MCU_ADDR
MOV D_BYTE,#0H
ACALL DISPLAY
SJMP SW_OUT:MOV A,MCU_DATA //数据输出
CJNE A,#00H,SS1 SETB jdq1 //接收到PC发来的数据00,关闭继电器1和2
SETB jdq2
SJMP SS0
SS1:CJNE A,#01H,SS2
SETB jdq1 //接收到PC发来的数据01,继电器1关闭,继电器2打开 CLR jdq2
SJMP SS0
SS2:CJNE A,#10H,SS3
CLR jdq1 //接收到PC发来的数据10,继电器1打开,继电器2关闭
SETB jdq2
SJMP SS0
SS3:CJNE A,#11H,SS0
CLR jdq1 //接收到PC发来的数据11,打开继电器1和2
CLR jdq2
SS0:RET
init_serial: //串口初始化函数
MOV SCON,#50H ;设置成串口1方式
MOV TMOD,#20H ;波特率发生器T1工作在模式2上
MOV TH1,#0FAH ;预置初值(按照波特率4800bit/s预置初值)
MOV TL1,#0FAH ;预置初值(按照波特率4800bit/s预置初值)
ORL PCON, #80H;波特率加倍 现在的波特率为9600bit/s
SETB TR1 ;启动定时器T1SETB ES
SETB EA
RETDISPLAY: MOV A,R0
PUSH ACC
MOV DPTR,#NUMTAB ;指定查表起始地址
MOV R0,#4DPL1: MOV R1,#25 ;显示1000次
DPLOP: MOV A,A_BYTE ;取个位数
MOVC A,@A+DPTR ;查个位数的7段代码
MOV P0,a ;送出个位的7段代码
CLR PS0 SETB PS1
ACALL D1MS ;显示1ms
MOV A,B_BYTE ;取十位数
MOVC A,@A+DPTR ;查十位数的7段代码
MOV P0,A ;送出十位的7段代码
SETB PS0 CLR PS1
ACALL D1MS ;显示1ms
MOV A,C_BYTE ;取百位数
MOVC A,@A+DPTR ;查百位数的7段代码
MOV P0,A ;送出百位的7段代码
SETB PS1 CLR PS2
ACALL D1MS ;显示1ms
MOV A,D_BYTE ;取千位数
MOVC A,@A+DPTR ;查千位数的7段代码
MOV P0,A ;送出千位的7段代码
SETB PS2 CLR PS3
ACALL D1MS ;显示1ms
SETB PS3
DJNZ R1,DPLOP ;100次没完循环
DJNZ R0,DPL1 ;4个100次没完循环 POP ACC
MOV R0,A
RETD1MS: MOV R7,#80 ;1ms延时
DJNZ R7,$
RETUART:CLR TI
CLR RI MOV A,RECV_NUM
CJNE A,#0,UU1
MOV A,SBUF
CJNE A,#MCU_ADDR,UU INC RECV_NUM
SJMP UU
UU1:CJNE A,#1,UU
MOV MCU_DATA,SBUF ACALL SW_OUT
MOV RECV_NUM,#0
CLR TI
MOV SBUF,#MCU_ADDR
JNB TI,$
CLR TI
MOV SBUF,MCU_DATA
JNB TI,$
CLR TI
UU: RETI
;实验板上的7段数码管0~9数字的共阴显示代码
numtab: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H,0FEH,0F6H
END```