
阿里云开发者社区



大家在互动










综合
最新
有奖励
免费用

社区供稿 | FunASR 语音大模型在 Arm Neoverse 平台上的优化实践
Arm 架构的服务器通常具备低功耗的特性,能带来更优异的能效比。相比于传统的 x86 架构服务器,Arm 服务器在相同功耗下能够提供更高的性能。这对于大模型推理任务来说尤为重要,因为大模型通常需要大量
让你的文档从静态展示到一键部署可操作验证
通过函数计算的能力让阿里云的文档从静态展示升级为动态可操作验证,用户在文档中单击一键部署可快速完成代码的部署及测试。这一改变已在函数计算的活动沙龙中得到用户的认可。
一键生成视频!用 PAI-EAS 部署 AI 视频生成模型 SVD 工作流
本教程将带领大家免费领取阿里云PAI-EAS的免费试用资源,并且带领大家在 ComfyUI 环境下使用 SVD的模型,根据任何图片生成一个小短视频。
ECS实例选型最佳实践
本课程主要讲解在客户明确自身业务功能、性能、稳定性需求,以及成本成本约束后去了解各规格族/规格特性,匹配自身需求选择所需服务器类型。实例规格选型最佳实践,就是为了帮助用户结合自身业务需求中性能、价格、
Redis核心开发者的新征程:阿里云与Valkey社区的技术融合与创新
阿里云瑶池数据库团队后续将持续参与Valkey社区,如过往在Redis社区一样耕耘,为开源社区作出持续贡献。

PAI-EAS 一键启动ComfyUI!SVD 图片一键生成视频 stable video diffusion 教程 SVD工作流
PAI-EAS 一键启动ComfyUI!SVD 图片一键生成视频 stable video diffusion 教程 SVD工作流
阿里云产品手册2024版
阿里云作为数字经济的重要建设者,不断加深硬核科技实力,通过自身能力助力客户实现高质量发展,共创数字新世界。阿里云产品手册 2024 版含产品大图、关于阿里云、引言、安全合规等内容,覆盖人工智能与机器学

flinkcdc3.0整库同步mysql的数据到starrocks中全量能过去增量过不去怎么排查?
flinkcdc3.0整库同步mysql的数据到starrocks中 全量能过去增量过不去怎么排查?
阿里云百炼大模型产品实践
RocketMQ 事件驱动:云时代的事件驱动有啥不同?
本文深入探讨了云时代 EDA 的新内涵及它在云时代再次流行的主要驱动力,包括技术驱动力和商业驱动力,随后重点介绍了 RocketMQ 5.0 推出的子产品 EventBridge,并通过几个云时代事件
阿里云 ClickHouse 企业版商业化发布会
阿里云 ClickHouse 企业版是阿里云和ClickHouse原厂 ClickHouse. Inc 独家合作的存算分离的云原生版本,支持资源按需弹性 Serverless,帮助企业降低成本的同时,


宜搭:提交表单前,如何校验另一张表单的数据?
大神帮忙实现用宜搭实现一个功能写一个详细的操作步骤提交表单A前根据表单A上的限制条件C查询另一张表单B的数据D校验这个D是否小于等于0如果D小于等于0系统禁止用户提交并提示“没有了”
更高效准确的数据库内部任务调度实践,阿里云数据库SelectDB 内核 Apache Doris 内置 Job Scheduler 的实现与应用
Apache Doris 2.1 引入了内置的 Job Scheduler,旨在解决依赖外部调度系统的问题,提供秒级精确的定时任务管理。
手把手教你捏一个自己的Agent
Modelscope AgentFabric是一个基于ModelScope-Agent的交互式智能体应用,用于方便地创建针对各种现实应用量身定制智能体,目前已经在生产级别落地。
基于Ollama+AnythingLLM轻松打造本地大模型知识库
Ollama是开源工具,简化了在本地运行大型语言模型(ile优化模型运行,支持GPU使用和热加载。它轻量、易用,可在Mac和Linux上通过Docker快速部署。AnythingLLM是Mintple
云效流水线智能排查功能实测:AI赋能DevOps,精准定位与高效修复实战评测
云效持续集成流水线Flow是阿里云提供的企业级CICD工具,免费且注册即用。它具备高可用性、免运维、深度集成阿里云服务、多样化发布策略及丰富的企业级特性。产品亮点包括智能排查功能,能快速定位问题,提高
使用Redis实例搭建网上商城的商品相关性分析程序
本教程将指导您如何快速创建实例并搭建网上商城的商品相关性分析程序。(ApsaraDB for Redis)是兼容开源Redis协议标准的数据库服务,基于双机热备架构及集群架构,可满足高吞吐、低延迟及弹
Claude3是什么?
Claude 3最近备受各大媒体瞩目,成为了AI领域备受关注的新宠。在ChatGPT推出更高版本之前,Claude 3已经被公认为是语言类AI工具中的佼佼者,特别在处理逻辑性和长篇上下文方面表现突出。
一文掌握大模型提示词技巧:从战略到战术
本文将用通俗易懂的语言,带你从战略(宏观)和战术(微观)两个层次掌握大模型提示词的常见技巧,真正做到理论和实践相结合,占领 AI 运用的先机。
亮数据:数据采集行业痛点的利器
在数据驱动的时代,企业需高效采集大量数据以作出明智决策,但面临IP限制、验证码识别和效率低下的挑战。BrightData应运而生,提供丰富的代理IP资源、高匿名性和稳定性保障,以及智能IP更换策略,有

每帧纵享丝滑——ToDesk云电脑、网易云游戏、无影云评测分析及ComfyUI部署
作为一种新兴的虚拟电脑服务方式,云电脑将传统电脑的计算、存储和应用服务等功能迁移到云端,打破了传统电脑的物理限制,通过云端连接,即可享受到高效、稳定的资源与服务,为人们提供了更加灵活、便捷、安全的工作
Llama 3开源!魔搭社区手把手带你推理,部署,微调和评估
Meta发布了 Meta Llama 3系列,是LLama系列开源大型语言模型的下一代。在接下来的几个月,Meta预计将推出新功能、更长的上下文窗口、额外的模型大小和增强的性能,并会分享 Llama

号外号外!ClickHouse企业版正式商业化啦!
阿里云将于2024年4月23日14:00举办《ClickHouse企业版商业化发布会》直播,探讨阿里云ClickHouse企业版的架构、功能与优势,以及未来一年的产品规划。直播还将分享ClickHou

PolarDB +AnalyticDB Zero-ETL :免费同步数据到ADB,享受数据流通新体验
Zero-ETL是阿里云瑶池数据库提供的服务,旨在简化传统ETL流程的复杂性和成本,提高数据实时性。降低数据同步成本,允许用户快速在AnalyticDB中对PolarDB数据进行分析,降低了30%的数
Flink CDC产品常见问题之look up hint 没有生效如何解决
Flink CDC(Change Data Capture)是一个基于Apache Flink的实时数据变更捕获库,用于实现数据库的实时同步和变更流的处理;在本汇总中,我们组织了关于Flink CDC
第十三期乘风伯乐奖--寻找百位乘风者伯乐,邀请新博主入驻即可获奖
乘风伯乐奖,面向阿里云开发者社区已入驻乘风者计划的博主(技术/星级/专家),邀请用户入驻乘风者计划即可获得乘风者定制周边等实物奖励。本期面向阿里云开发者社区寻找100位乘风伯乐,邀请人数月度TOP 1
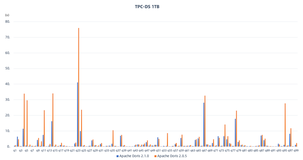
阿里云数据库 SelectDB 内核 Apache Doris 2.1.0 版本发布:开箱盲测性能大幅优化,复杂查询性能提升 100%
亲爱的社区小伙伴们,Apache Doris 2.1.0 版本已于 2024 年 3 月 8 日正式发布,新版本开箱盲测性能大幅优化,在复杂查询性能方面提升100%,新增Arrow Flight接口加
阿里云数据库内核 Apache Doris 兼容 Presto、Trino、ClickHouse、Hive 等近十种 SQL 方言,助力业务平滑迁移
阿里云数据库 SelectDB 内核 Doris 的 SQL 方言转换工具, Doris SQL Convertor 致力于提供高效、稳定的 SQL 迁移解决方案,满足用户多样化的业务需求。兼容 Pr


钱大妈生鲜如何利用 CCR 实现 Apache Doris 集群读写分离
钱大妈基于 阿里云 SelectDB 内核 Apache Doris 搭建了实时数仓,为业务提供实时精准分析的数据查询及分析服务。凭借 Apache Doris 强大的性能,钱大妈能够实时监控生鲜产品
得物 ZooKeeper SLA 也可以 99.99%丨最佳实践
在本文中,作者探讨了ZooKeeper(ZK)的一个内存占用问题,特别是当有大量的Watcher和ZNode时,导致的内存消耗。
Flink CDC在阿里云DataWorks数据集成应用实践
本文整理自阿里云 DataWorks 数据集成团队的高级技术专家 王明亚(云时)老师在 Flink Forward Asia 2023 中数据集成专场的分享。

R语言用潜类别混合效应模型(Latent Class Mixed Model ,LCMM)分析老年痴呆年龄数据
R语言用潜类别混合效应模型(Latent Class Mixed Model ,LCMM)分析老年痴呆年龄数据
智能媒体服务更新后依旧缺少批量一键成片的文件,怎么回事?
智能媒体服务使用composer更新ice-20201109库更新后依旧缺少批量一键成片的文件怎么回事SubmitBatchMediaProducingJobRequest.php、SubmitBa
在智能媒体服务我是要跟后端统一配置吗?还是说可以配置缩放这些?!
这里画布我设置这些参数但是后端生成是1080*1920的配置出来的文字好小在智能媒体服务我是要跟后端统一配置吗还是说可以配置缩放这些
智能媒体服务 关键词扩写, 在哪看收费?
智能媒体服务 关键词扩写 在哪看收费 https://help.aliyun.com/zh/ims/developer-reference/api-ice-2020-11-09-submittext
智能媒体服务这个批量智能一键成片,在剪辑合成的时候,是纯随机进行剪辑,还是有AI读取视频?
智能媒体服务这个批量智能一键成片在剪辑合成的时候是纯随机进行剪辑还是有AI读取视频或者图片内容然后和文案匹配剪辑吗
智能媒体服务这个的云剪辑怎么打不开?
智能媒体服务这个的云剪辑怎么打不开InvalidTimelineFormat ErroeMessage:Invalid timeline format, caused by: Video.In gr

